
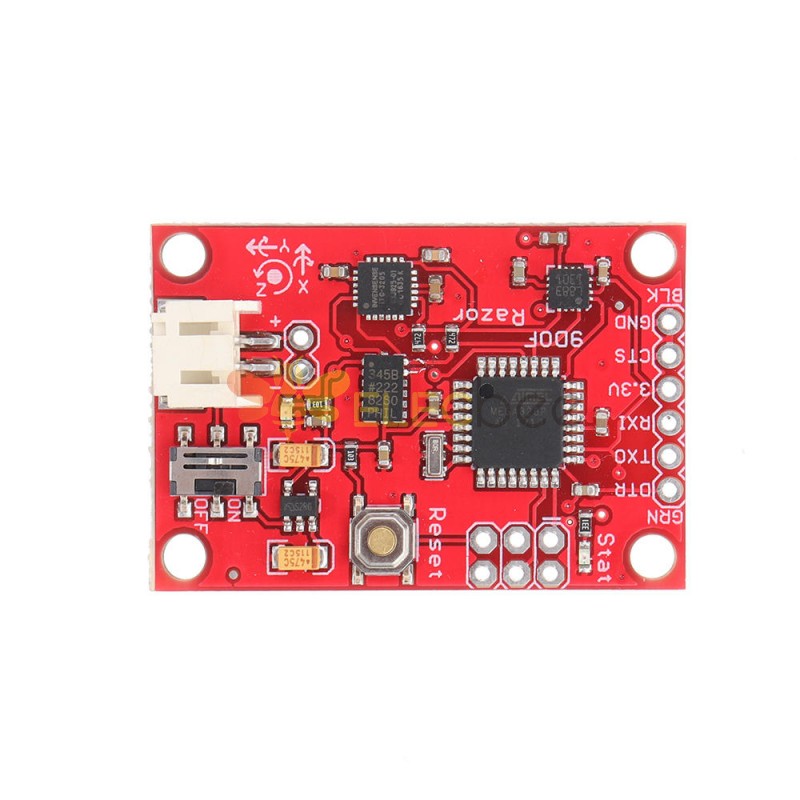
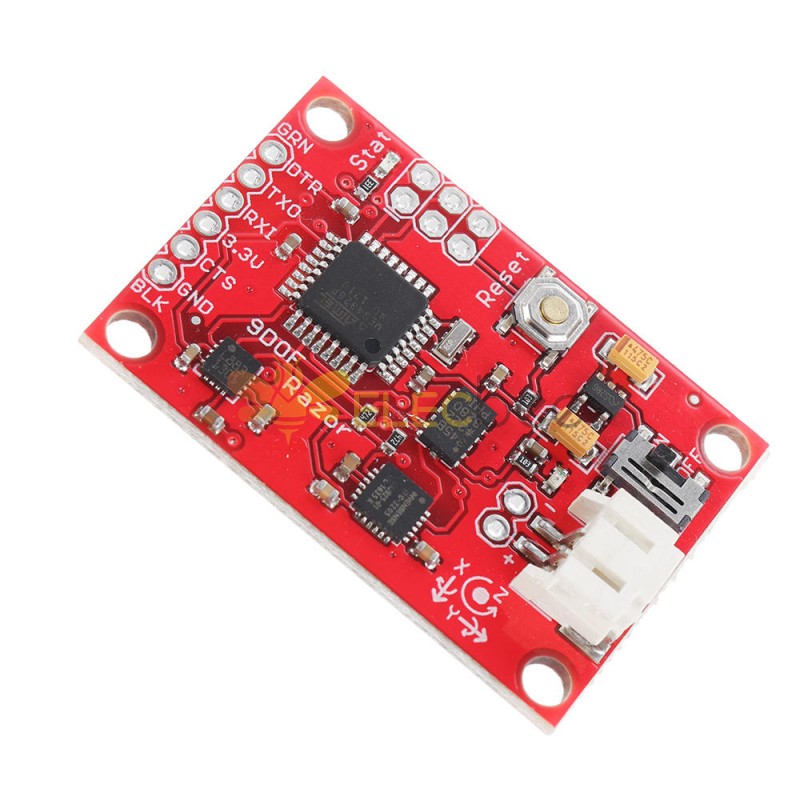
9 Eksen Atmega328 Sensör Modülü IMU AHRS ITG3200/ITG3205 Gyro ADXL345 İvmeölçer HMC5883L Arduino için Manyetometre 3-5V DC - resmi Arduino kartlarıyla çalışan ürünler



- Açıklama



Standart kalibrasyon:
Güçlendirmek iyi olabilirUsturaKalibrasyondan birkaç dakika önce, böylece sensörler ısınabilir. Sensörleri ilk kez kalibre etmek biraz zor olabilir, ama başlayalım:
- /Razor_AHRS/Razor_AHRS.ino için for kullanarak açın ve "KULLANICI KURULUM ALANI" / "SENSÖR KALİBRASYONU" bölümünü bulun. Kalibrasyon değerlerini daha sonra koyacağınız yer burasıdır.
- BağlanAHRS tıraş bıçaklarıiçin doğru seri bağlantı noktasını ayarlayın veSeri Monitör.
Ürün yazılımı varsayılanlarını değiştirmediyseniz, bunun gibi çok sayıda çıktı görmelisiniz:
#YPR=-155.73,-76.48,-129.51Üretici yazılımını ayarlayınçıkış moduilekalibrasyon#oc dizesini göndererek. Şimdi şöyle bir çıktı görmelisiniz:
hızlanma x,y,z (min/maks) = -5,00/-1,00 25,00/29,00 225,00/232,00
- İvmeölçeri kalibre etme:
- Her eksende yerçekimi için minimum ve maksimum çıkış değerlerini bulmaya çalışacağız.Tahtayı hareket ettirirken, gerçekten yavaş hareket ettirin, böylece tahtaya uyguladığınız ivme mümkün olduğunca küçük olsun.Biz sadece saf yerçekimi istiyoruz!
- Tahtayı alın ve x-ekseni ile düz bir şekilde aşağıya doğrultun (unutmayın: x-ekseni = konektör deliklerinin olduğu kısa kenara doğru). Bunu yaparken x-maksimumunun (ikinci değer) büyüdüğünü görebilirsiniz.
- Panoyu sabit tutun ve tekrar #oc göndererek ölçümü sıfırlayın.
- Şimdi, değer daha fazla büyümeyene kadar tahtayı dikkatlice her yöne biraz eğin ve x-maksimum değerini yazın.
- X-mini mumu elde etmek için karşı taraf için (x ekseni yukarıyı gösterir) aynı şeyi yapın: konuma getirin, ölçümü sıfırlamak için #oc gönderin, x-minimum değerini bulun ve not edin.
- Aynı şeyi z ekseni (aşağı ve yukarı) ve y ekseni (sağ ve sol) için yapın.
- Tahtayı çok hızlı sallayarak veya hareket ettirerek ölçümü bozduğunuzu düşünüyorsanız, #oc göndererek her zaman sıfırlayabilirsiniz.
- Artık tüm minimum/maks değerlerine sahip olmalısınız. Bunları Razor_AHRS.ino'ya koyun.
- NOT: Bunu yaparken çok dikkatli olmalısınız! Tahtaya parmakla hafifçe vurmak bile ölçümü bozar (deneyin!) ve yanlış kalibrasyona yol açar. #oc çok sık kullanın ve minimum/maks değerlerinizi iki kez kontrol edin)
Manyetometreyi kalibre etme:
- Bu sefer tahtayı istediğiniz kadar sallayabilirsiniz, ancak onu bilgisayarların ve diğer elektronik cihazların ve metal nesnelerin neden olduğu manyetik bozulmalardan uzaklaştırın.
- Halakalibrasyon moduivmeölçer için. Kalibrasyonu şuraya taşıyacak #on'u gönderin:Sonrakimanyetometre olan sensör.
- NOT:Bu bölüm referans olarak burada kalır, ancak daha yeni "Genişletilmiş manyetometre kalibrasyonunu kullanmalısınız (bkz.sonraki bölüm) çünkü çok daha iyi sonuçlar verir! Bunu atlayabilir ve jiroskopla devam edebilirsiniz.
- Her eksende toprak manyetik alanı için minimum ve maksimum çıkış değerlerini bulmaya çalışacağız. Bu, temelde ivmeölçeri kalibre etmek gibi çalışır, ancak dünyanın manyetik alanı düz bir şekilde aşağıya bakmaz. Şu anda gezegenin neresinde olduğunuza bağlı olarak, belirli bir açıyla kuzey-yukarı (güney yarımküre) veya kuzey-aşağı (kuzey yarımküre) işaret eder. Bu açı denireğim. Ek olarak, gerçek coğrafi kuzeyden küçük bir sapma olabilir, bunasapma. GörmekVikipedi. Aşağıdaki açıklama, manyetometreyi kuzey yarım kürede kalibre ettiğinizi varsayar.
- Kartı, x ekseni (unutmayın: x ekseni = ileri, konektör deliklerine doğru) kuzeyi gösterecek şekilde bir pusula gibi düz tutun. Ardından tahtayı doğu-batı ekseni etrafında döndürmeye başlayın, böylece aşağıyı göstermeye başlar. x maksimumunu (ikinci değer) gözlemleyin.Seri Monitörve tahtanın x eksenini dünyanın manyetik alanıyla hizaladığınızda fark edeceksiniz. Orada dönmeyi bırakın ve değer artık daha fazla büyümeyene kadar her yöne biraz eğin.
- X-mini mumu elde etmek için karşı taraf için de aynı şeyi yapın: önce kuzeyi, sonra aşağıyı gösterin.
- Manyetometre için ölçümler arasında #oc ile sıfırlamamız gerekmez.
- Aynı şeyi z ekseni (yukarı/aşağı) ve y ekseni (sol/sağ) için yapın.
- NOT: Tahtanın dönüşüetrafındaÖlçmek istediğiniz eksen önemli değil, sadece doğru yönü gösteriyor. Örneğin, z eksenini ölçmeye başladığınızda, x ekseninin yukarı veya aşağı veya sola veya sağa bakması fark etmez.
Artık cebinizde böyle bir şeye sahip olmalısınız.Seri Monitör:
büyütme x,y,z (min/maks) = -564,00/656,00 -585,00/635,00 -550,00/564,00Bu değerleri Razor_AHRS.ino'ya yerleştirin.
Jiroskopu kalibre etme:
- YatırUsturahala masada.
- Halakalibrasyon modumanyetometre için. Kalibrasyonu şuraya taşıyacak #on'u gönderin:Sonrakijiroskop olan sensör.
- 10 saniye bekleyin ve hareket ettirmeyin.Ustura.Üç eksende de jiroskopun gürültüsünü toplayacak ve ortalamasını alacaktır.
Artık şuna benzeyen bir çıktıya sahip olmalısınız:
cayro x,y,z (akım/ortalama) = -29,00/-27,98 102,00/100,51 -5,00/-5,85- Tahtayı sallayarak veya hareket ettirerek ölçümü bozduğunuzu düşünüyorsanız #oc göndererek sıfırlayabilirsiniz.
- Her bir çiftin ikinci değerlerini alın ve bunları Razor_AHRS.ino'ya koyun.
- Tamamlamak :)
Genişletilmiş manyetometre kalibrasyonu
- Kalibrasyona başlamak için sensörü daha sonra kullanılacağı manyetik ortama koyun - örn. ses uygulamaları için kafa takibi yapmanız gerekiyorsa (kulaklıkların güçlü mıknatısları vardır, kalibrasyondan sonra sensörü ne kadar az hareket ettirirseniz, sonuçlarınız o kadar iyi olur; ayrıca bazı sahte malzemeler koymayı da düşünmelisiniz) normal işitme konumuna getirmek için kulaklıkların arasına).
- Sensörden okuma yapan tüm uygulamalardan çıkın (örn.Seri Monitör,İşlemetest taslağı, …) ve çalıştırınİşlemeİşleme/Magnetometer_calibration'da bulunan manyetometre kalibrasyon çizimi. Aslında, önce EJML kitaplığını kurmanız gerekir, aksi takdirde çizim çalışmayacaktır. Bu nasıl yapılır? şuna bir bakNOTMagnetometer_calibration.pde'nin üst kısmında.
Sensörü, küreyi aşağı yukarı eşit şekilde kaplayan noktalar oluşturacak şekilde tüm yönleri kapsayacak şekilde döndürmeye çalışın.
Çoğunlukla bozulmamış bir ortamda bu şöyle görünebilir:

BOŞLUK'a basın ve videoyu izleyinİşlemekonsol - "KULLANICI KURULUM ALANI" / "SENSÖR KALİBRASYONU" altında ürün yazılımına girmeniz gereken bazı kod satırları bulacaksınız ve bitirdiniz.
Toplanan veriler (noktalar) ayrıca çizim klasöründeki bir magnetom.float dosyasına yazılır. Matlab'a sahip olmanız durumunda, Matlab/magnetometer_calibration altında bu dosyayı kullanan ve sizin için bazı grafikler üreten magnetometer_calibration.m adlı bir komut dosyası bulacaksınız, böylece kalibrasyonu görsel olarak kontrol edebilirsiniz.
Elipsoid uyum ve düzeltilmiş değerler:


Başka bir kalibrasyon örneği: Yumuşak demir, ölçeklenmiş ve bir elips şeklinde bozulmuş bir küre verir.
Örneklenmiş ham manyetometre değerleri:

Elipsoid uyum ve düzeltilmiş değerler:






- Yorumlar (29)
- Q & A
-
: Elecbee ürünlerinin kaynağı nerededir? Onlar sertifikalı mı?2023-03-03
-
Cevap:
Elecbee, Çin'deki OEM fabrikalarıyla uzun vadeli işbirliği anlaşmalarına sahiptir. Bu sayede ara kanal maliyetini azaltabilir ve para tasarrufu sağlayabiliriz. Tüm ürünlerimiz, ürünlerin iyi uyumluluğunu ve mükemmel kalitesini sağlamak için ilgili küresel standartlara sıkı sıkıya uygun olarak üretilmektedir.
2023-03-03
-
: Hangi ödeme yöntemlerini kabul ediyorsunuz?2023-03-03
-
Cevap:
Ana ödeme yöntemlerimiz arasında Paypal, kredi kartları, banka kartları, banka havalesi ve keşfedilecek daha
2023-03-03
-
: Gönderimi ne zaman düzenleyeceksiniz?2023-03-03
-
Cevap:
Ödemenizin alındığını onayladıktan sonra, mümkün olan en kısa sürede teslimatı düzenleyeceğiz ve kurye numarasını takip edebilmeniz için web sitesine yükleyeceğiz.
2023-03-03
-
: Değişim veya iade nasıl yapılır?2023-03-03
-
Cevap:
1.Ürünü teslim aldıktan sonra 30 gün içinde iade başvurusu yapabilirsiniz. Lütfen dış paketin sağlam olduğundan ve ürünün orijinal durumda olduğundan emin olun. Paket bize ulaştığında ilgili hükümlere göre iadenizi düzenleyeceğiz.
2.İade süreci: İade başvurusu yapın - İade onayını alın - İade işlemini düzenleyin - Ürünleri teslim alın ve kontrol edin - İade işlemini gerçekleştirin.
3.Kalite sorunu gibi bizim tarafımızdan kaynaklanan iadeler için taşıma ücretlerini biz karşılayacağız. Alıcı tarafından kaynaklanan iadeler için, alıcı nakliye ücretinden sorumlu olmalıdır.
2023-03-03
İlgili Ürünler

MH-Z19B Yükseltme Sürümü 0-5000PPM Kızılötesi CO2 Sensörü CO2 İç Mekan Hava Kalitesi Monitörü UART/PWM

5 adet W1308H LED Mikrobilgisayar Dijital Ekran Sıcaklık Kontrol Cihazı Ayarlanabilir Termostat Akıllı Zaman Kontrol Cihazı 12V
20 adet APDS-9960 Hareket Sensörü Modülü Arduino için Dijital RGB Işık Sensörü