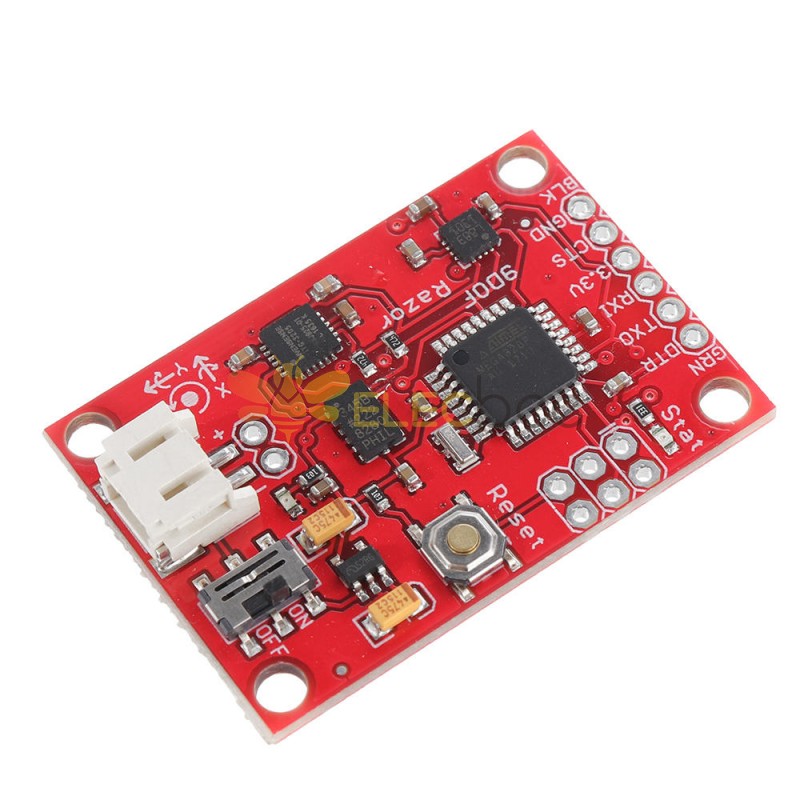
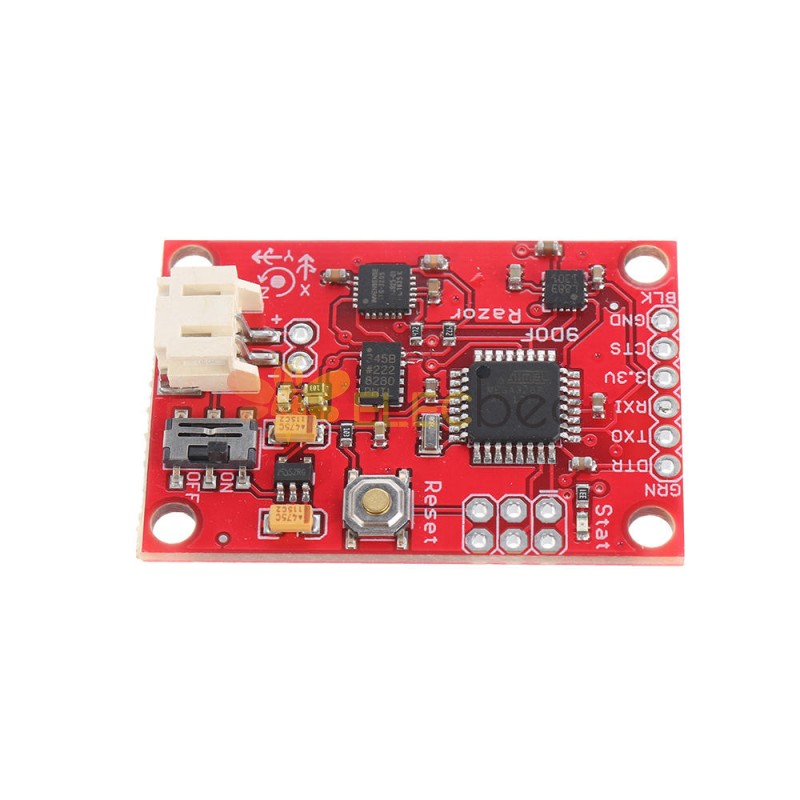
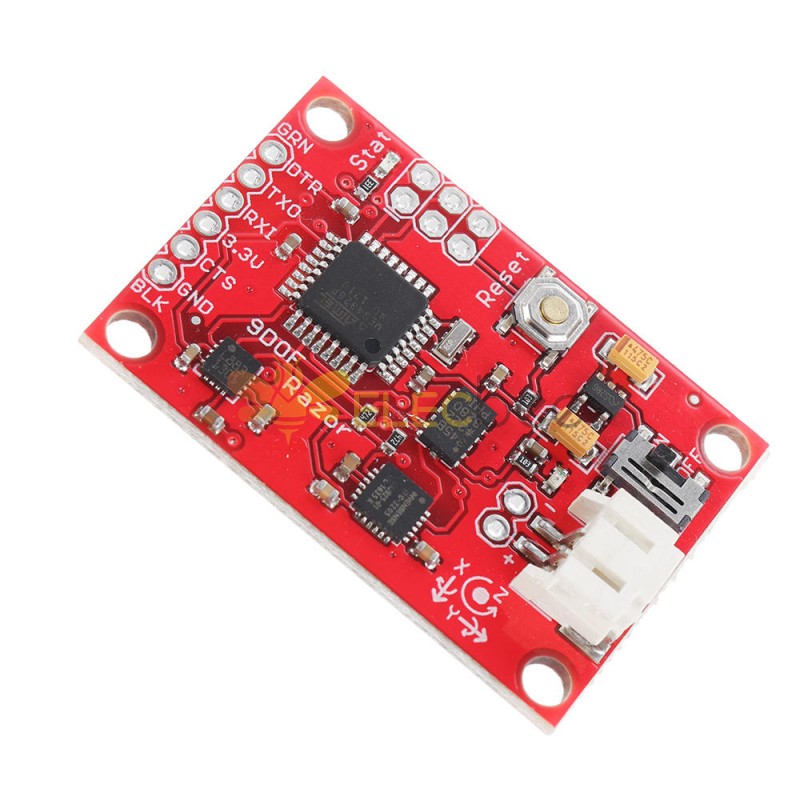



- 商品詳情



標準校準:
啟動電源可能會很好剃刀校準前幾分鐘,以便傳感器可以預熱。 第一次校準傳感器可能有點棘手,但讓我們開始吧:
- Open for /剃刀_AHRS/剃刀_AHRS.inousing for並找到“用戶設置區域”/“傳感器校準”部分。 這是您稍後放置校準值的地方。
- 連接剃刀 AHRS到您的計算機,設置正確的串行端口並打開串行監視器.
如果您沒有更改固件默認值,您應該會看到很多這樣的輸出:
#YPR=-155.73,-76.48,-129.51設置固件輸出方式到校準通過發送字符串#oc。 您現在應該看到如下輸出:
加速度 x,y,z (最小/最大) = -5.00/-1.00 25.00/29.00 225.00/232.00
- 校準加速度計:
- 我們將嘗試在每個軸上找到地球引力的最小和最大輸出值。當你移動板子時,移動它真的很慢,所以你施加的加速度盡可能小。我們只想要純粹的重力!
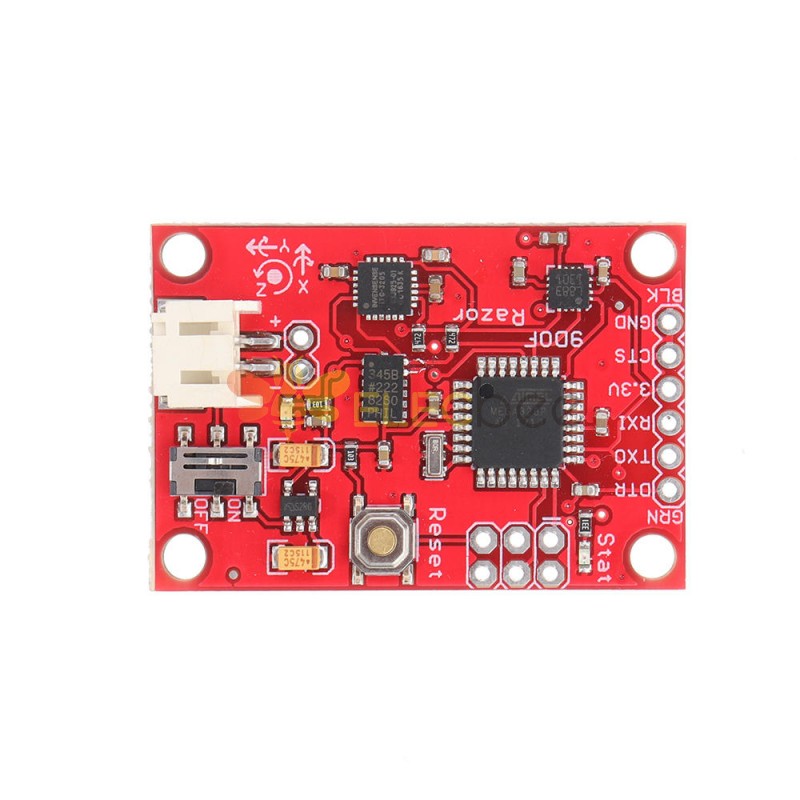
- 拿起電路板並用 x 軸指向正下方(記住:x 軸 = 指向帶有連接器孔的短邊)。 當您這樣做時,您可以看到 x 最大值(第二個值)變大。
- 保持電路板靜止並再次發送#oc 重置測量值。
- 現在小心地將板向各個方向傾斜一點,直到值不再變大並記下 x 最大值。
- 對另一側(x 軸朝上)做同樣的事情以獲得 x-mini mum: 放置到位,發送#octo 重置測量,找到 x-mini mum 值並將其記下。
- 對 z 軸(向下和向上)和 y 軸(左右)執行相同的操作。
- 如果您認為由於搖晃或移動板太快而弄亂了測量,您可以隨時通過發送#oc 來重置。
- 您現在應該擁有所有的最小/最大值。 將它們放入刀刀_AHRS.ino。
- 筆記: 做這個的時候一定要非常小心! 即使用手指輕輕敲擊電路板也會弄亂測量(試試吧!)並導致校準錯誤。 經常使用#ocvery 並仔細檢查您的最小值/最大值)
校準磁力計:
- 這一次您可以隨意搖動電路板,但要使其遠離由計算機和其他電子設備和金屬物體引入的磁畸變。
- 仍然校準 mode對於加速度計。 Send#on,這會將校準移動到下一個傳感器,也就是磁力計。
- 筆記:本節留在這裡供參考,但你應該使用更新的“擴展磁力計校準”(見下一個 section) 因為它產生了更好的結果! 您可以跳過此步驟並繼續使用陀螺儀。
- 我們將嘗試找到每個軸上地球磁場的最小輸出值和最大輸出值。 這基本上就像校準加速度計一樣工作,除了地球的磁場不會筆直指向下方。 根據您目前在地球上的位置,它以特定角度指向北上(南半球)或北下(北半球)。 這個角度叫做傾角. 此外,可能與真正的地理北方有微小的偏差,這被稱為偏角. 看維基百科. 以下描述假設您正在校準北半球的磁力計。
- 將電路板像指南針一樣平放,x 軸(記住:x 軸 = 向前,朝向連接器孔)指向北方。 然後開始旋轉板大約東西軸,使其開始指向下方。 觀察中的 x 最大值(第二個值)串行監視器當您將電路板的 x 軸與地球磁場對齊時,您會注意到。 在那裡停止旋轉,然後再次向各個方向傾斜一點,直到值不再變大。
- 對面做同樣的事情得到x-mini媽媽:先指向北方,然後指向下方。
- 對於磁力計,我們不需要在測量之間用#oc 重置。
- 對 z 軸(上/下)和 y 軸(左/右)執行相同的操作。
- 筆記: The rotation of the board大約您要測量的軸並不重要,只要它指向正確的方向即可。 例如,當您開始測量 z 軸時,x 軸指向上、下、左或右並不重要。
你現在應該在你的串行監視器:
放大 x、y、z(最小值/最大值)= -564.00 / 656.00 -585.00 / 635.00 -550.00 / 564.00將這些值放入刀刀_AHRS.ino。
校準陀螺儀:
- 奠定了剃刀還在桌子上。
- 仍然校準 mode對於磁力計。 Send#on,這會將校準移動到下一個傳感器,也就是陀螺儀。
- 等待 10 秒,不要移動剃刀.它將收集並平均陀螺儀在所有三個軸上的噪聲。
您現在應該有如下所示的輸出:
陀螺儀 x,y,z (電流/平均值) = -29.00/-27.98 102.00/100.51 -5.00/-5.85- 如果您認為搖動或移動板子弄亂了測量,您可以通過發送#oc 來重置。
- 取每對的第二個值並將它們放入刀刀_AHRS.ino。
- 完畢 :)
Extended magnetometer 校準
- 要開始校準,請將傳感器放在稍後將使用的磁性環境中 - 例如 在耳機上的確切位置,如果您需要對音頻應用進行頭部跟踪(耳機有很強的磁鐵,校准後移動傳感器的次數越少,效果就會越好;您還應該考慮放置一些虛擬材料 耳罩之間,使它們處於正常的聽力位置)。
- 退出所有從傳感器讀取的應用程序(例如串行監視器,加工測試草圖,...)並運行加工磁力計校準草圖位於加工/Magnetometer_校準。 事實上,您必須先安裝 EJML 庫,否則草圖將無法運行。 怎麼做? 看看筆記at the top ofMagnetometer_校準.pde.
嘗試以某種方式旋轉傳感器,以便覆蓋所有方向,以便產生或多或少均勻覆蓋球體的點。
在基本未失真的環境中,這可能看起來像這樣:

點擊空間並觀看加工控制台 - 你會發現一些代碼行,你必須在“用戶設置區域”/“傳感器校準”下放入固件,你就完成了。
收集的數據(點)也被寫入草圖文件夾中的文件 magnetom.float。 現在,如果您擁有 Matlab,在 Matlab/magnetometer_校準下,您會找到一個名為 magnetometer_校準.m 的腳本,它使用該文件並為您生成一些圖,因此您可以直觀地檢查校準。
橢球擬合及校正值:


另一個校準例子: Soft iron 給出了一個按比例縮放並扭曲成橢圓體的球體。
採樣原始磁力計值:

橢球擬合及校正值:






- 商品評價 (29)
- 商品咨詢
-
:Elecbee產品的起源在哪裡?它們是否獲得了認證?2023-03-03
-
店主回復:
Elecbee與中國的OEM工廠長期合作,以此來降低中間渠道成本,幫助您節省開支。我們的產品都是嚴格按照相關全球標準製作的,以確保產品具有良好的兼容性和卓越的品質。
2023-03-03
-
:您們接受哪些付款方式?2023-03-03
-
店主回復:
我們的主要付款方式包括 Paypal、信用卡、借記卡、銀行轉帳等等,還有更多付款方式等待您的發掘。請選擇您喜歡的付款方式。
2023-03-03
-
:您何時安排發貨?2023-03-03
-
店主回復:
在確認收到您的付款後,我們會盡快安排送貨,並上傳快遞單號至網站,以供您追蹤。
2023-03-03
-
:如何進行退換貨?2023-03-03
-
店主回復:
1.您可以在收到商品後的30天內申請退貨。請確保外包裝完好無損,產品保持原狀。一旦我們收到包裹,根據相關規定安排退款。
2.退貨流程:提交退貨申請 - 審核通過退貨申請 - 安排退貨 - 收到商品並檢查 - 我們安排退款。
3.對於因我們造成的退貨,例如質量問題,我們將承擔運費。對於由買家造成的退貨,買家應負責運費。
2023-03-03