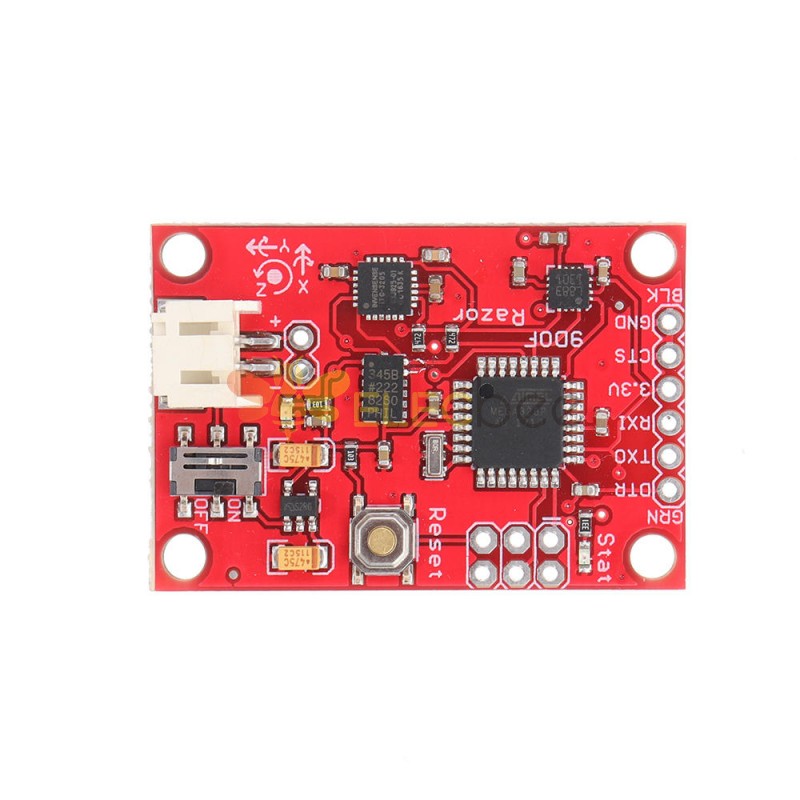
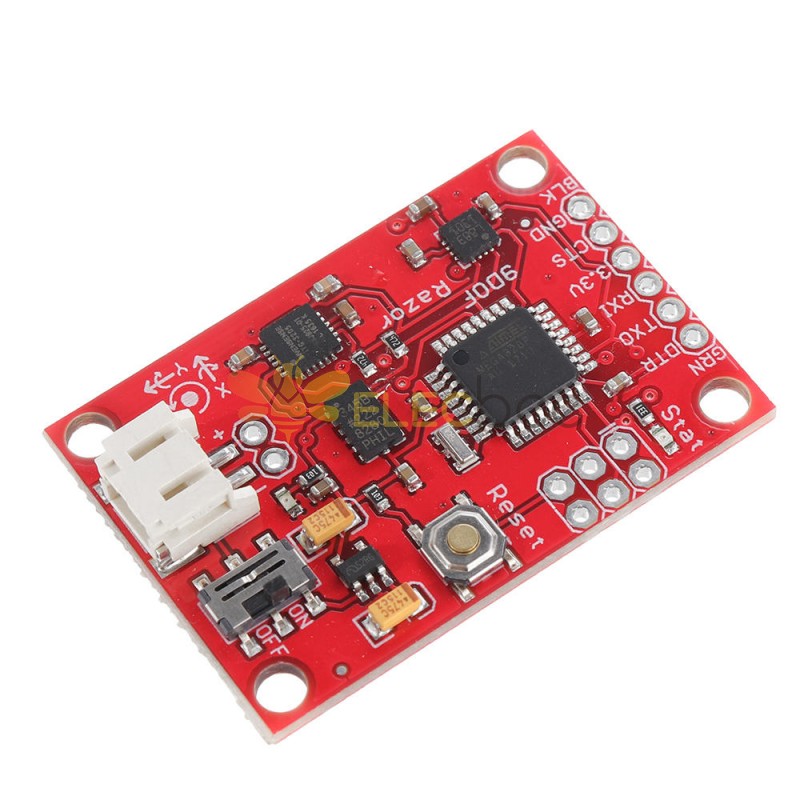
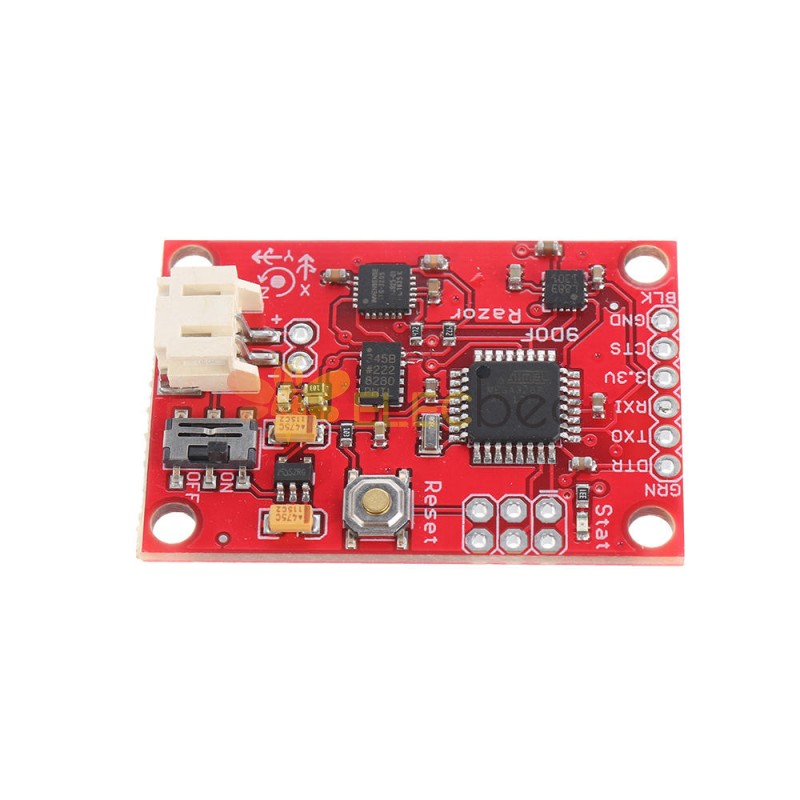
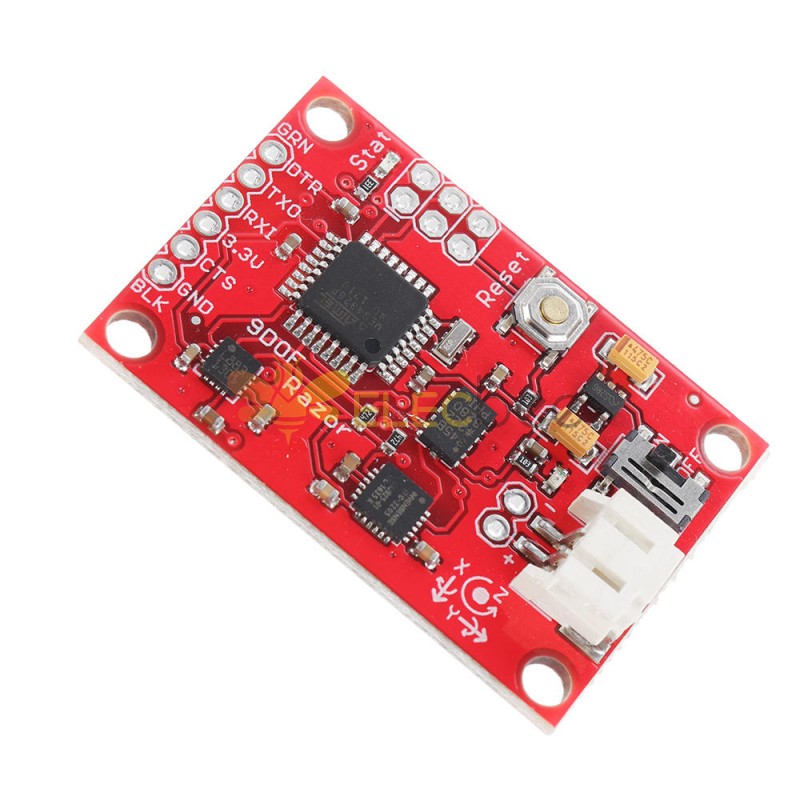
Módulo Sensor Atmega328 de 9 Eixos IMU AHRS ITG3200/ITG3205 Gyro ADXL345 Acelerômetro HMC5883L Magnetômetro 3-5V DC para Arduino - produtos que funcionam com placas Arduino oficiais



- Descrição



Calibração padrão:
Pode ser bom ligar oNavalhaalguns minutos antes da calibração, para que os sensores possam aquecer. Calibrar os sensores na primeira vez pode ser um pouco complicado, mas vamos lá:
- Abra para /Razor_AHRS/Razor_AHRS.ino usando para e localize a seção "ÁREA DE CONFIGURAÇÃO DO USUÁRIO" / "CALIBRAÇÃO DO SENSOR". É aqui que você coloca os valores de calibração mais tarde.
- Conecte oaparelhos de barbear AHRSao seu computador, defina a porta serial correta para e abra oMonitor Serial.
Se você não alterou os padrões do firmware, deverá ver muitos resultados como este:
#YPR=-155,73,-76,48,-129,51Definir o firmwaremodo de saídaparacalibraçãoenviando a string #oc. Agora você deve ver uma saída como esta:
acel x,y,z (min/max) = -5,00/-1,00 25,00/29,00 225,00/232,00
- Calibrando o acelerômetro:
- Tentaremos encontrar os valores de saída mínimo e máximo para a gravitação da Terra em cada eixo.Quando você mover o tabuleiro, mova-o bem devagar, para que a aceleração aplicada seja a menor possível.Nós só queremos pura gravidade!
- Pegue a placa e aponte para baixo com o eixo x (lembre-se: eixo x = em direção à borda curta com os orifícios do conector). Enquanto você faz isso, você pode ver o x máximo (o segundo valor) ficando maior.
- Segure o quadro bem imóvel e redefina a medição enviando #oc novamente.
- Agora incline cuidadosamente o tabuleiro um pouco em todas as direções até que o valor não aumente mais e anote o valor máximo de x.
- Faça o mesmo para o lado oposto (eixo x apontando para cima) para obter o x-mínimo: coloque na posição, envie #oc para redefinir a medição, encontre o valor x-mínimo e anote-o.
- Faça o mesmo para o eixo z (para baixo e para cima) e o eixo y (direita e esquerda).
- Se você acha que estragou a medição agitando ou movendo o quadro muito rápido, você sempre pode redefinir enviando #oc.
- Agora você deve ter todos os valores mínimo/máximo. Coloque-os em Razor_AHRS.ino.
- OBSERVAÇÃO: Você tem que ter muito cuidado ao fazer isso! Mesmo um leve toque com o dedo na placa atrapalha a medição (experimente!) e leva a uma calibração errada. Use #oc com muita frequência e verifique seus valores mínimo/máximo)
Calibrando o magnetômetro:
- Desta vez, você pode agitar o quadro o quanto quiser, mas afaste-o das distorções magnéticas introduzidas por computadores e outros dispositivos eletrônicos e objetos de metal.
- ainda estamosmodo de calibraçãopara o acelerômetro. Envie #on, que moverá a calibração para opróximosensor, que é o magnetômetro.
- OBSERVAÇÃO:Esta seção fica aqui para referência, mas você deve usar a mais recente "calibração estendida do magnetômetro (consultepróxima seção), pois produz resultados muito melhores! Você pode pular isso e continuar com o giroscópio.
- Tentaremos encontrar os valores de saída mínimo e máximo para o campo magnético da terra em cada eixo. Isso basicamente funciona como calibrar o acelerômetro, exceto que o campo magnético da Terra não aponta diretamente para baixo. Dependendo de onde no planeta você está atualmente, ele aponta para o norte e para cima (hemisfério sul) ou norte e para baixo (hemisfério norte) em um determinado ângulo. Este ângulo é chamadoinclinação. Além disso, pode haver um pequeno desvio do norte geográfico verdadeiro, que é chamadodeclinação. VerWikipédia. A descrição a seguir assume que você está calibrando o magnetômetro no hemisfério norte.
- Segure a placa plana como uma bússola com o eixo x (lembre-se: eixo x = para frente, em direção aos orifícios do conector) apontando para o norte. Em seguida, comece a girar a placa em torno do eixo leste-oeste para que comece a apontar para baixo. Observe o x-máximo (o segundo valor) noMonitor Seriale você notará quando alinhar o eixo x do quadro com o campo magnético da Terra. Pare de girar aí e novamente incline um pouco em todas as direções até que o valor não aumente mais.
- Faça o mesmo para o lado oposto para obter o x-mini mum: primeiro aponte para o norte e depois para baixo.
- Para o magnetômetro, não precisamos redefinir com #oc entre as medições.
- Faça o mesmo para o eixo z (cima/baixo) e o eixo y (esquerda/direita).
- NOTA: A rotação da placaem voltao eixo que você deseja medir não importa, apenas que aponte na direção correta. Por exemplo, quando você começa a medir o eixo z, não importa se o eixo x aponta para cima ou para baixo, para a esquerda ou para a direita.
Agora você deve ter algo assim em seuMonitor Serial:
magn x,y,z (min/max) = -564,00/656,00 -585,00/635,00 -550,00/564,00Coloque esses valores em Razor_AHRS.ino.
Calibrando o giroscópio:
- Coloque oNavalhaainda sobre a mesa.
- ainda estamosmodo de calibraçãopara o magnetômetro. Envie #on, que moverá a calibração para opróximosensor, que é o giroscópio.
- Aguarde 10 segundos e não mova oNavalha.Ele coletará e calculará a média do ruído do giroscópio em todos os três eixos.
Agora você deve ter uma saída parecida com esta:
giroscópio x,y,z (atual/média) = -29,00/-27,98 102,00/100,51 -5,00/-5,85- Se você acha que estragou a medição sacudindo ou movendo o quadro, pode redefinir enviando #oc.
- Pegue os segundos valores de cada par e coloque-os em Razor_AHRS.ino.
- Feito :)
Calibração estendida do magnetômetro
- Para iniciar a calibração, coloque o sensor no ambiente magnético onde será utilizado posteriormente - por ex. no local exato em seus fones de ouvido, se você precisar de rastreamento de cabeça para aplicações de áudio (fones de ouvido têm ímãs fortes, quanto menos você mover o sensor após a calibração, melhores serão os resultados; você também deve pensar em colocar algum material fictício entre os fones de ouvido para colocá-los na posição de audição normal).
- Saia de todos os aplicativos que leem do sensor (por exemplo,Monitor Serial,Em processamentoesboço de teste, …) e execute oEm processamentoesboço de calibração do magnetômetro localizado em Processing/Magnetometer_calibration. Na verdade, primeiro você precisa instalar a biblioteca EJML, caso contrário, o esboço não será executado. Como fazer isso? Dê uma olhada noOBSERVAÇÃOna parte superior de Magnetometer_calibration.pde.
Tente girar o sensor de forma a cobrir todas as orientações para produzir pontos que cubram a esfera de maneira mais ou menos uniforme.
Em um ambiente quase sem distorções, isso poderia ser algo como isto:

Pressione ESPAÇO e assista aoEm processamentoconsole - você encontrará algumas linhas de código que precisa inserir no firmware em "ÁREA DE CONFIGURAÇÃO DO USUÁRIO" / "CALIBRAÇÃO DO SENSOR" e pronto.
Os dados coletados (os pontos) também são gravados em um arquivo magnetom.float na pasta do esboço. Agora, caso você possua o Matlab, emMatlab/magnetometer_calibration você encontrará um script chamado magnetometer_calibration.m que usa esse arquivo e produz alguns gráficos para você, para que você possa verificar visualmente a calibração.
Ajuste do elipsóide e valores corrigidos:


Outro exemplo de calibração: o ferro macio fornece uma esfera dimensionada e distorcida em um elipsóide.
Valores brutos amostrados do magnetômetro:

Ajuste do elipsóide e valores corrigidos:






- Comentários (29)
- Q & A
-
De onde vêm os produtos da Elecbee? Eles são certificados?2023-03-03
-
Responder:
A Elecbee tem acordos de cooperação de longo prazo com fábricas OEM na China. Isso nos permite reduzir o custo do canal intermediário e ajudar a economizar dinheiro. Todos os nossos produtos são feitos estritamente de acordo com as normas globais relevantes, para garantir boa compatibilidade e excelente qualidade dos produtos.
2023-03-03
-
Que formas de pagamento vocês aceitam?2023-03-03
-
Responder:
Nossos principais métodos de pagamento incluem Paypal, cartões de crédito, cartões de débito, transferência bancária e mais a descobrir. Por favor, escolha os métodos de pagamento que preferir.
2023-03-03
-
Quando você irá organizar o envio?2023-03-03
-
Responder:
Após a confirmação do recebimento do seu pagamento, organizaremos a entrega o mais rápido possível e carregaremos o número de rastreamento no site para que você possa acompanhar.
2023-03-03
-
Como fazer uma troca ou devolução?2023-03-03
-
Responder:
1.Você pode solicitar a devolução dentro de 30 dias após o recebimento do produto. Certifique-se de que a embalagem externa esteja intacta e que o produto esteja em sua condição original. Providenciaremos o reembolso de acordo com as disposições relevantes assim que recebermos o pacote.
2.Processo de devolução: Solicitar devolução - Aprovar devolução - Organizar devolução - Receber os produtos e realizar inspeção - Providenciar reembolso.
3.Nós arcaremos com as despesas de frete para devoluções causadas por nós, como problemas de qualidade. Em relação a devoluções causadas pelo comprador, o comprador deverá ser responsável pelas despesas de envio.
2023-03-03
Produtos relacionados

MH-Z19B Versão de atualização 0-5000PPM Sensor de CO2 infravermelho para CO2 Monitor de qualidade do ar interno UART/PWM

20 peças APDS-9960 módulo sensor de gestos sensor de luz RGB digital para Arduino