
제품 검색...

전원을 켜는 것이 좋을 수 있습니다.면도칼센서가 예열될 수 있도록 보정 몇 분 전에 센서를 처음으로 보정하는 것은 약간 까다로울 수 있지만 시작하겠습니다.
펌웨어 기본값을 변경하지 않은 경우 다음과 같은 많은 출력이 표시됩니다.
#YPR=-155.73,-76.48,-129.51펌웨어 설정출력 모드에게구경 측정#oc 문자열을 전송합니다. 이제 다음과 같은 출력이 표시됩니다.
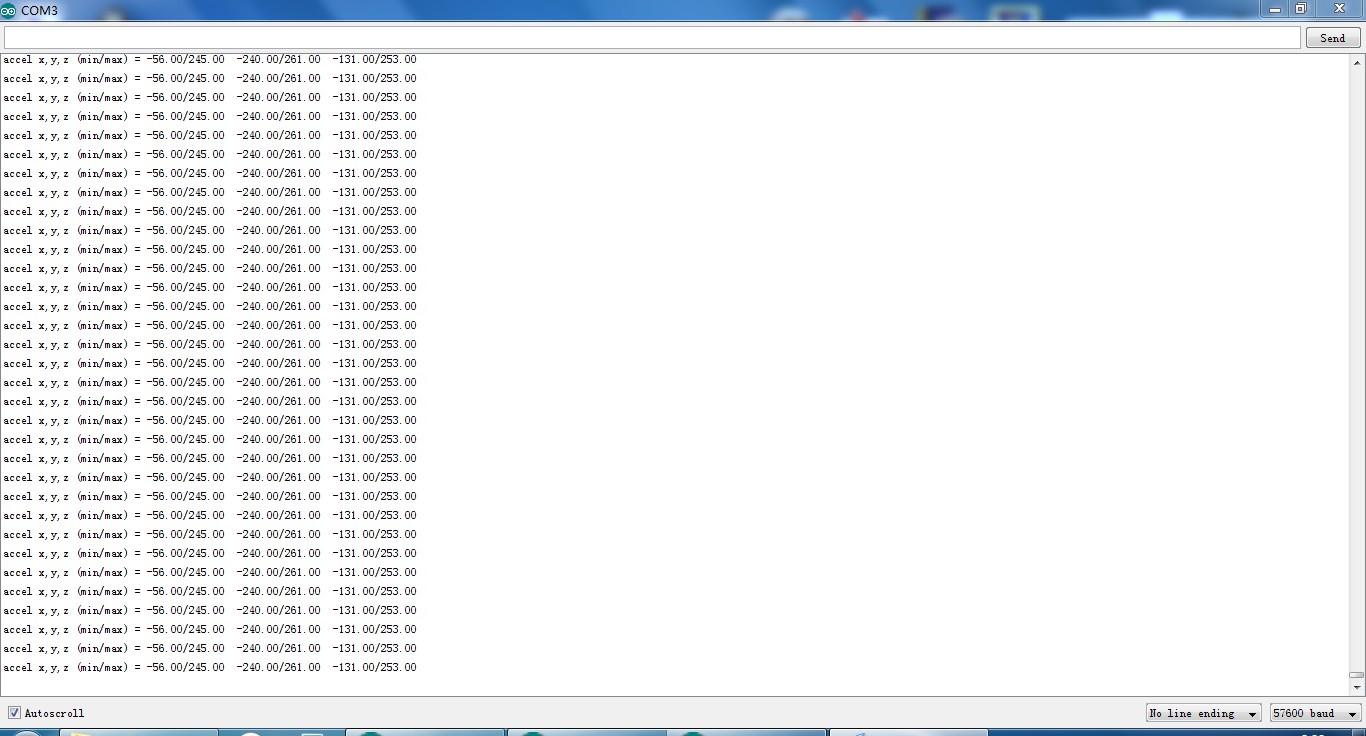
가속 x,y,z(최소/최대) = -5.00/-1.00 25.00/29.00 225.00/232.00자력계 보정:
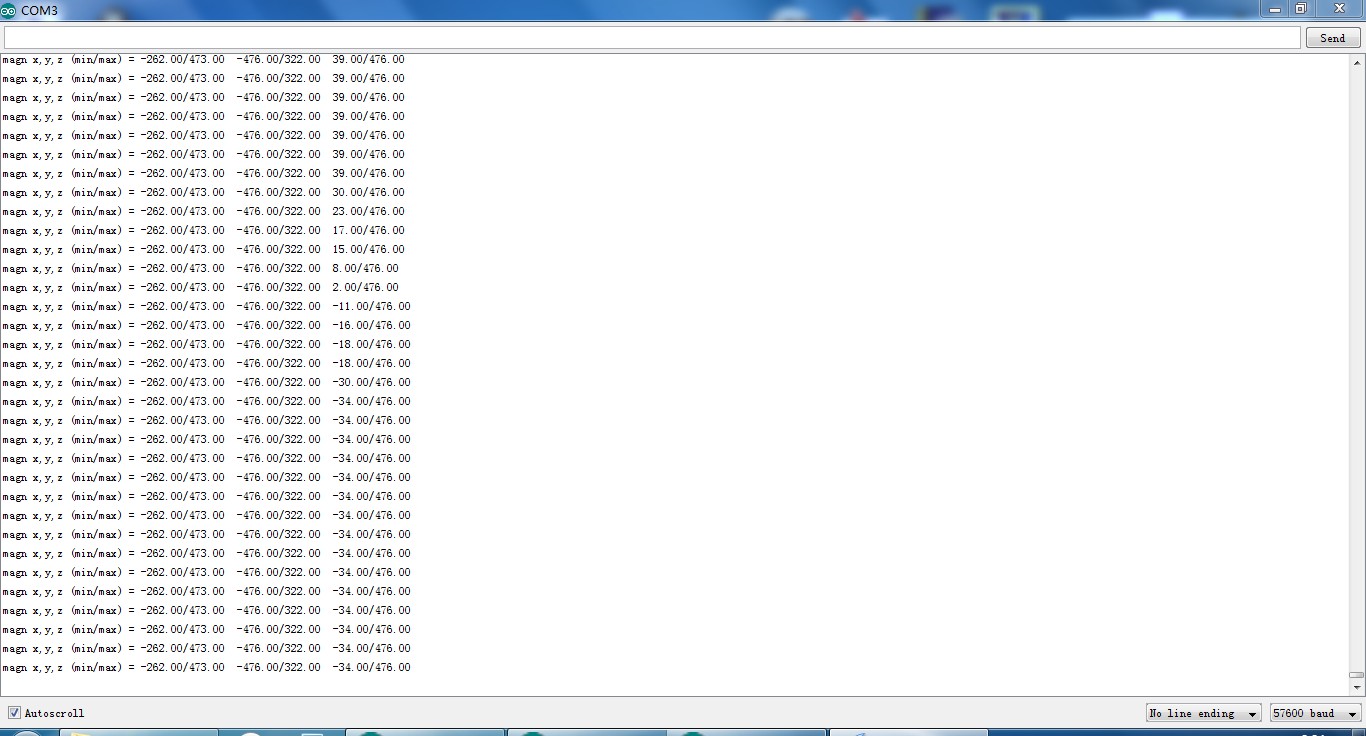
이제 다음과 같은 항목이 있어야 합니다.직렬 모니터:
배율 x,y,z(최소/최대) = -564.00/656.00 -585.00/635.00 -550.00/564.00이 값을 Razor_AHRS.ino에 입력합니다.
자이로스코프 보정:
이제 다음과 같은 출력이 표시됩니다.
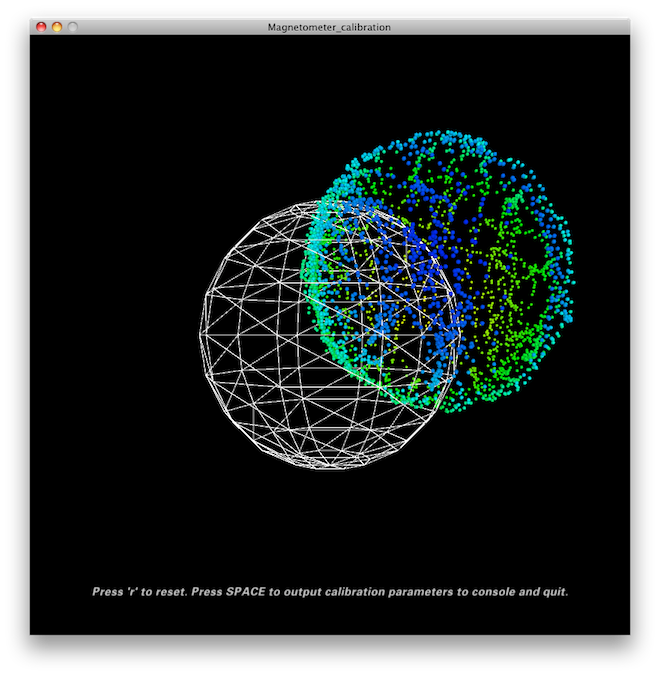
자이로 x,y,z (전류/평균) = -29.00/-27.98 102.00/100.51 -5.00/-5.85모든 방향을 커버하는 방식으로 센서를 회전시켜 구체를 다소 고르게 덮는 점을 생성합니다.
대부분 왜곡되지 않은 환경에서 이것은 다음과 같이 보일 수 있습니다.
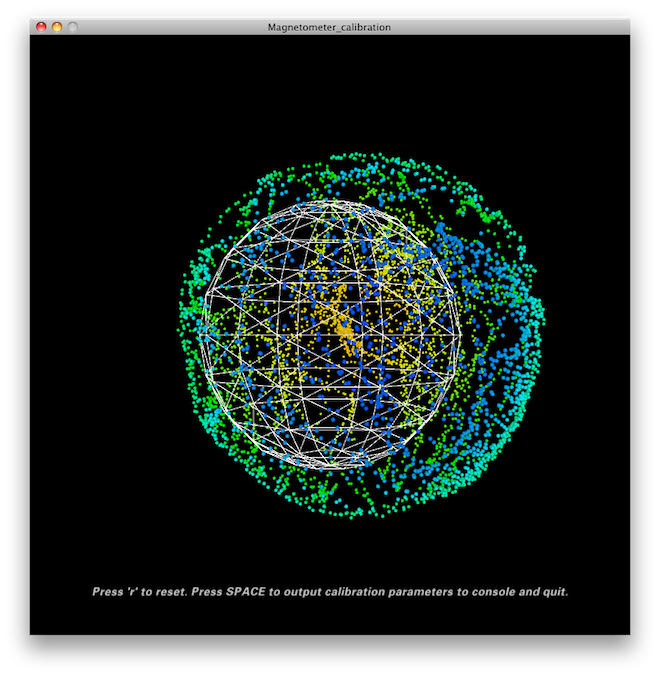
SPACE를 누르고Processing콘솔 - 'USER SETUP AREA' / 'SENSOR CALIBRATION' 아래에서 펌웨어에 입력해야 하는 몇 줄의 코드를 찾으면 완료됩니다.
수집된 데이터(점)는 스케치 폴더의 magnetom.float 파일에도 기록됩니다. 이제 Matlab을 소유하고 있는 경우 Matlab/magnetometer_calibration에서 이 파일을 사용하고 일부 플롯을 생성하는 magnetometer_calibration.m이라는 스크립트를 찾을 수 있으므로 보정을 시각적으로 확인할 수 있습니다.
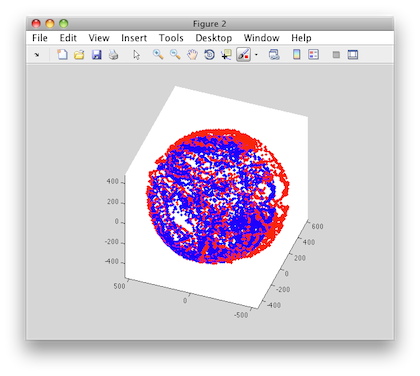
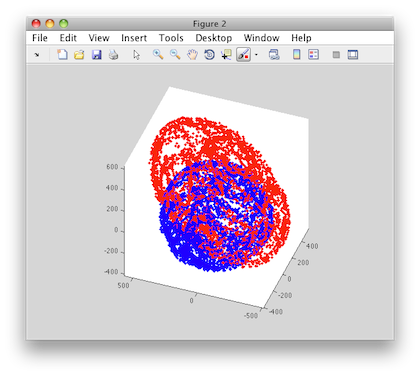
타원체 맞춤 및 수정된 값:
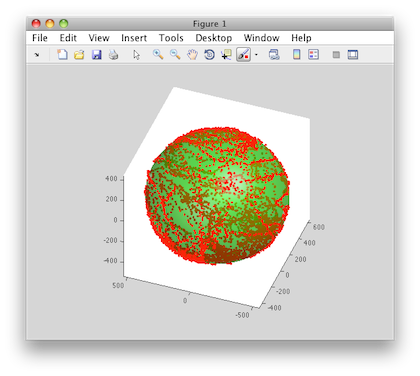
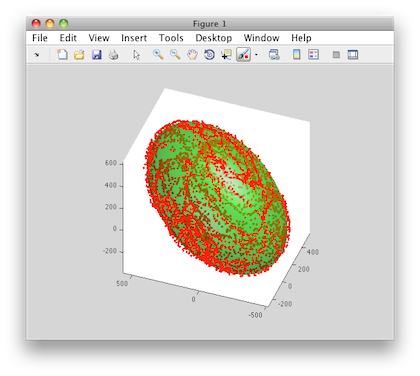
샘플링된 원시 자력계 값:
타원체 맞춤 및 수정된 값:
배송 | 배송 기간 | 재고 상품은 3일 내에 발송될 예정입니다. Elecbee는 매일 약 17:00에 발송합니다(일요일 제외). 발송 후 예상 배송 시간은 선택한 운송사에 따라 다릅니다. DHL 익스프레스: 3-7 영업일 DHLeCommerce: 12-22 영업일 FedEx 국제 우선: 3-7 영업일 EMS: 10-15 영업일 등기 항공 우편: 15-30 영업일 | |
| 배송비 | 주문 배송비는 장바구니에서 확인할 수 있습니다. | ||
| 배송 옵션 | 주문 배송비는 장바구니에서 확인할 수 있습니다. | ||
| 물류 추적 | 주문 발송 후 이메일로 운송장 번호를 보내드리며, 「내 주문 추적」 기능으로 물류를 조회할 수 있습니다. | ||
| 반품/보증 | 반품 | 반품/교환은 일반적으로 발송 후 30일 내에 완료해야 하며, 고객 서비스에 연락하여 반품 승인을 받으세요. 상품은 사용하지 않은 상태여야 하며 원래 포장을 유지해야 합니다. 배송비는 고객이 부담합니다. | |
| 보증 | 모든 Elecbee 구매 상품은 30일 무조건 반품 정책과 1년 Elecbee 보증(제조 결함 대상)을 받습니다. | ||
| 본 보증은 고객의 잘못된 조립, 설명서 미준수, 제품 수정, 부주의 또는 부적절한 사용으로 인한 결함 상품에는 적용되지 않습니다. | |||
| 주문 | 구매 방법 | Elecbee는 온라인 주문을 지원합니다. | |
| 장바구니에 추가 > 결제 > 주문 제출 > 결제 완료 > 배송 | |||
| 결제 | PayPal, 신용카드(Visa, MasterCard, 아메리칸 익스프레스), 은행 송금. | ||
