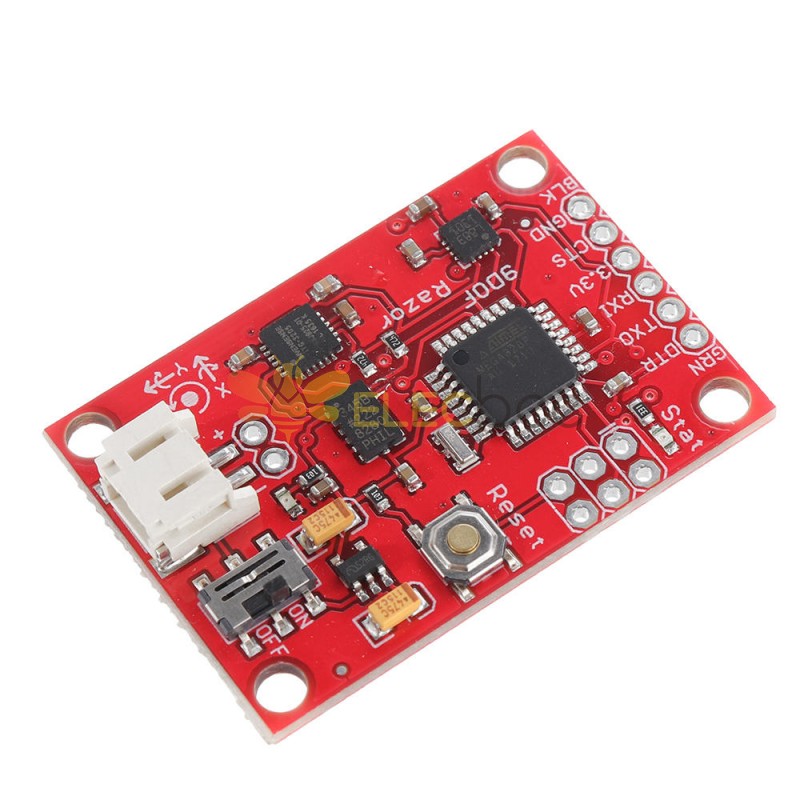
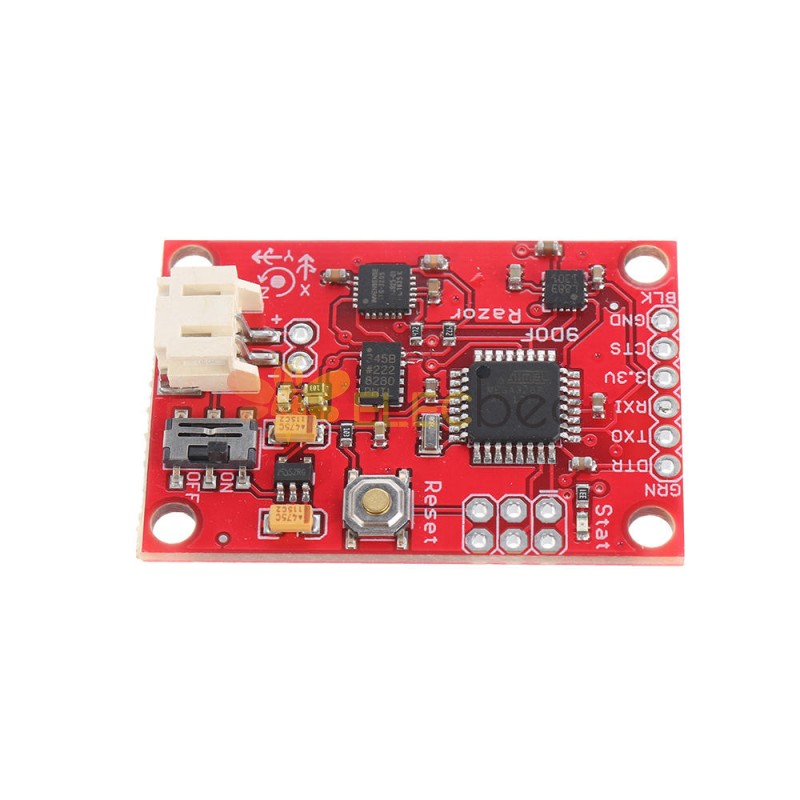
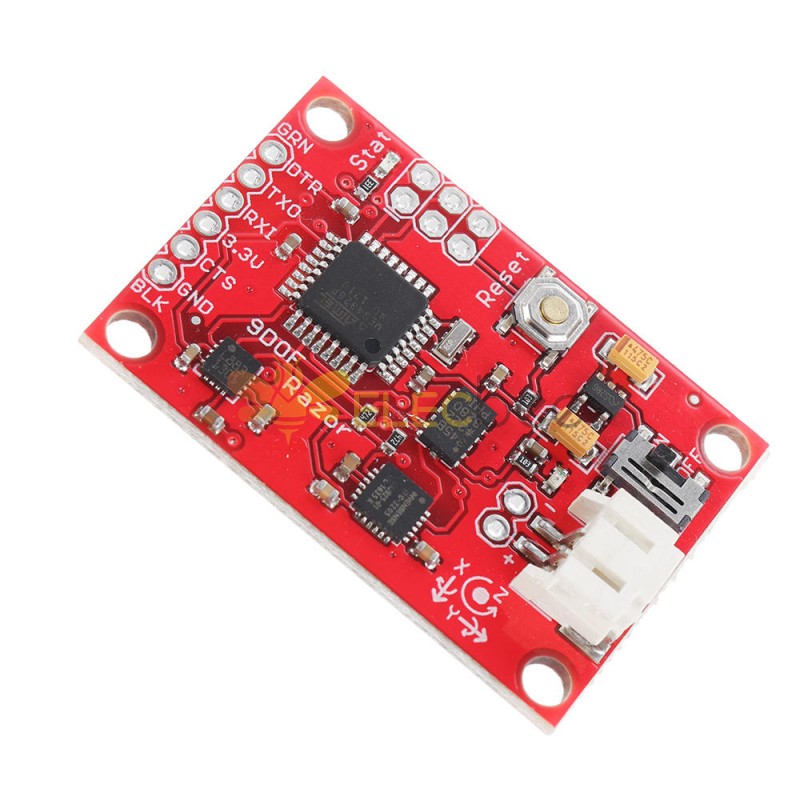



- 상품소개



표준 교정:
전원을 켜는 것이 좋을 수 있습니다.면도칼센서가 예열될 수 있도록 보정 몇 분 전에 센서를 처음으로 보정하는 것은 약간 까다로울 수 있지만 시작하겠습니다.
- /Razor_AHRS/Razor_AHRS.ino를 사용하여 열고 'USER SETUP AREA' / 'SENSOR CALIBRATION' 섹션을 찾습니다. 이것은 나중에 보정 값을 입력하는 곳입니다.
- 연결AHRS 면도기컴퓨터에 올바른 직렬 포트를 설정하고직렬 모니터.
펌웨어 기본값을 변경하지 않은 경우 다음과 같은 많은 출력이 표시됩니다.
#YPR=-155.73,-76.48,-129.51펌웨어 설정출력 모드에게구경 측정#oc 문자열을 전송합니다. 이제 다음과 같은 출력이 표시됩니다.
가속 x,y,z(최소/최대) = -5.00/-1.00 25.00/29.00 225.00/232.00
- 가속도계 보정:
- 각 축의 지구 중력에 대한 최소 출력 값과 최대 출력 값을 찾으려고 노력할 것입니다.보드를 움직일 때 보드를 아주 천천히 움직이면 적용되는 가속도가 가능한 한 작아집니다.우리는 순수한 중력만을 원합니다!
- 보드를 잡고 x축으로 똑바로 아래를 가리킵니다(기억: x축 = 커넥터 구멍이 있는 짧은 가장자리를 향함). 그렇게 하는 동안 x-maximum(두 번째 값)이 점점 커지는 것을 볼 수 있습니다.
- 보드를 아주 가만히 잡고 #oc를 다시 전송하여 측정을 재설정합니다.
- 이제 값이 더 이상 커지지 않을 때까지 보드를 모든 방향으로 조금씩 조심스럽게 기울이고 x-최대 값을 기록합니다.
- 반대쪽(x축이 위를 향함)에 대해 동일한 작업을 수행하여 x-mini mum을 가져옵니다. 위치를 가져오고 #oc를 전송하여 측정을 재설정하고 x-mini mum 값을 찾아 기록합니다.
- z축(아래쪽)과 y축(오른쪽 및 왼쪽)에 대해 동일한 작업을 수행합니다.
- 보드를 너무 빨리 흔들거나 움직여서 측정이 잘못되었다고 생각되면 언제든지 #oc를 전송하여 재설정할 수 있습니다.
- 이제 모든 최소/최대 값이 있어야 합니다. Razor_AHRS.ino에 넣습니다.
- 메모: 이럴 때 정말 조심해야 해요! 손가락으로 보드를 살짝 두드려도 측정이 엉망이 되어(시도해 보십시오!) 잘못된 보정이 발생합니다. #oc를 자주 사용하고 최소/최대 값을 다시 확인하세요.)
자력계 보정:
- 이번에는 원하는 만큼 보드를 흔들 수 있지만 컴퓨터 및 기타 전자 장치와 금속 물체에 의해 도입된 자기 왜곡에서 멀리 이동하십시오.
- 여전히 있었다보정 모드가속도계용. 보정을 다음으로 이동하는 #on을 보냅니다.다음자력계인 센서입니다.
- 메모:이 섹션은 참조용으로 여기 있지만 최신 "확장 자력계 보정(참조:다음 섹션) 훨씬 더 나은 결과를 얻을 수 있습니다! 이것을 건너뛰고 자이로스코프를 계속 사용할 수 있습니다.
- 각 축의 지구 자기장에 대한 최소 출력값과 최대 출력값을 찾아보도록 하겠습니다. 이것은 기본적으로 가속도계를 보정하는 것과 같이 작동하지만 지구의 자기장이 똑바로 아래를 향하지 않는다는 점만 다릅니다. 현재 있는 행성의 위치에 따라 특정 각도에서 북쪽과 위쪽(남반구) 또는 북쪽과 아래쪽(북반구)을 가리킵니다. 이 각도는기울기. 또한 진정한 지리적 북쪽에서 약간의 편차가 있을 수 있습니다.기움. 보다위키백과. 다음 설명에서는 북반구에서 자력계를 보정한다고 가정합니다.
- x축(x축 = 앞쪽, 커넥터 구멍을 향함)이 북쪽을 향하도록 보드를 나침반처럼 평평하게 잡습니다. 그런 다음 동서 축을 중심으로 보드를 회전하기 시작하여 아래쪽을 가리키기 시작합니다. x-maximum(두 번째 값)을 관찰하십시오.직렬 모니터보드의 x축을 지구의 자기장과 정렬하면 알 수 있습니다. 여기서 회전을 멈추고 값이 더 이상 커지지 않을 때까지 모든 방향으로 조금씩 기울입니다.
- x-mini mum을 얻기 위해 반대쪽에도 같은 작업을 수행합니다. 먼저 북쪽을 가리킨 다음 아래쪽을 가리킵니다.
- 자력계의 경우 측정 사이에 #oc로 재설정할 필요가 없습니다.
- z축(위/아래) 및 y축(왼쪽/오른쪽)에 대해 동일한 작업을 수행합니다.
- 참고: 보드의 회전약측정하려는 축은 중요하지 않으며 올바른 방향을 가리키기만 하면 됩니다. 예를 들어 z축 측정을 시작할 때 x축이 위나 아래 또는 왼쪽이나 오른쪽을 가리키는지는 중요하지 않습니다.
이제 다음과 같은 항목이 있어야 합니다.직렬 모니터:
배율 x,y,z(최소/최대) = -564.00/656.00 -585.00/635.00 -550.00/564.00이 값을 Razor_AHRS.ino에 입력합니다.
자이로스코프 보정:
- 누워면도칼여전히 테이블 위에 있습니다.
- 여전히 있었다보정 모드자기계용. 보정을 다음으로 이동하는 #on을 보냅니다.다음자이로 스코프 인 센서입니다.
- 10초 동안 기다리십시오.면도칼.세 축 모두에서 자이로스코프의 노이즈를 수집하고 평균화합니다.
이제 다음과 같은 출력이 표시됩니다.
자이로 x,y,z (전류/평균) = -29.00/-27.98 102.00/100.51 -5.00/-5.85- 보드를 흔들거나 움직여 측정을 잘못했다고 생각되면 #oc를 전송하여 재설정할 수 있습니다.
- 각 쌍의 두 번째 값을 가져와 Razor_AHRS.ino에 넣습니다.
- 완료 :)
확장된 자력계 교정
- 보정을 시작하려면 센서를 나중에 사용할 자기 환경에 두십시오. 헤드폰의 정확한 위치에 오디오 애플리케이션을 위해 헤드 트래킹이 필요한 경우(헤드폰에는 강력한 자석이 있으므로 보정 후 센서를 적게 움직일수록 결과가 더 좋아집니다. 더미 재료를 넣는 것도 고려해야 합니다. 정상 청력 위치로 가져오기 위해 이어 컵 사이).
- 센서에서 읽는 모든 애플리케이션을 종료합니다(예:직렬 모니터,처리테스트 스케치, ...) 그리고처리처리/Magnetometer_calibration에 있는 자력계 보정 스케치입니다. 실제로 EJML 라이브러리를 먼저 설치해야 합니다. 그렇지 않으면 스케치가 실행되지 않습니다. 그렇게하는 방법? 한번 보세요메모Magnetometer_calibration.pde 상단에 있습니다.
모든 방향을 커버하는 방식으로 센서를 회전시켜 구체를 다소 고르게 덮는 점을 생성합니다.
대부분 왜곡되지 않은 환경에서 이것은 다음과 같이 보일 수 있습니다.

SPACE를 누르고Processing콘솔 - 'USER SETUP AREA' / 'SENSOR CALIBRATION' 아래에서 펌웨어에 입력해야 하는 몇 줄의 코드를 찾으면 완료됩니다.
수집된 데이터(점)는 스케치 폴더의 magnetom.float 파일에도 기록됩니다. 이제 Matlab을 소유하고 있는 경우 Matlab/magnetometer_calibration에서 이 파일을 사용하고 일부 플롯을 생성하는 magnetometer_calibration.m이라는 스크립트를 찾을 수 있으므로 보정을 시각적으로 확인할 수 있습니다.
타원체 맞춤 및 수정된 값:


또 다른 캘리브레이션 예: 연철은 크기가 조정되고 타원체로 왜곡된 구를 제공합니다.
샘플링된 원시 자력계 값:

타원체 맞춤 및 수정된 값:






- 상품평 (29)
- Q & A
-
: Elecbee 제품의 출처는 어디입니까? 인증되어 있습니까?2023-03-03
-
답변:
Elecbee는 중국의 OEM 공장과 장기적인 협력 계약을 체결하여 중간 채널 비용을 절감하고 비용을 절약할 수 있습니다. 모든 제품은 관련 국제 표준에 엄격하게 따라 제작되어 제품의 호환성과 우수한 품질을 보장합니다.
2023-03-03
-
: 어떤 결제 수단을 받으세요?2023-03-03
-
답변:
저희의 주요 결제 수단에는 Paypal, 신용카드, 직불카드, 은행 송금 등이 있으며, 더 많은 결제 수단이 발견될 수 있습니다. 자신에게 맞는 결제 수단을 선택하십시오.
2023-03-03
-
: 언제 배송을 배치하시겠습니까?2023-03-03
-
답변:
결제 금액을 확인한 후, 가능한 한 빠르게 배송을 배치하고 택배 번호를 웹 사이트에 업로드하여 추적할 수 있도록 합니다.
2023-03-03
-
: 교환 또는 반품 방법은?2023-03-03
-
답변:
1.상품을 받은 후 30일 이내에 반품 신청을 할 수 있습니다. 외부 포장이 손상되지 않았는지, 제품이 원래 상태인지 확인해 주세요. 패키지가 접수되면 관련 규정에 따라 환불 처리를 해드립니다.
2.반품 절차: 반품 신청 - 반품 승인 - 반품 처리 - 제품 수령 및 검사 - 환불 처리.
3.제품의 품질 문제 등으로 인한 반품은 저희가 운송비를 부담합니다. 구매자의 책임으로 인한 반품에 대해서는 구매자가 운송비를 부담해야 합니다.
2023-03-03
관련 상품

MH-Z19B 업그레이드 버전 0-5000PPM CO2 실내 공기질 모니터 UART/PWM 용 적외선 CO2 센서