1. 자동 유도: 누군가가 유도 한계에 들어가면 높은 수준으로 들어가고, 사람들은 센서 범위를 벗어나 자동으로 높은 수준으로 지연됩니다. 출력이 낮습니다.
2. 감광성 제어(선택 사항): 위치를 위해 예약된 모듈은 감광성 제어, 낮 동안 강한 빛 또는 감응작용으로 설정할 수 있습니다. 감광 제어는 선택 사항이며 공장에서는 감광 저항을 설치하지 않았습니다. 필요한 경우 별도의 감광 저항기를 구입하여 설치하십시오.
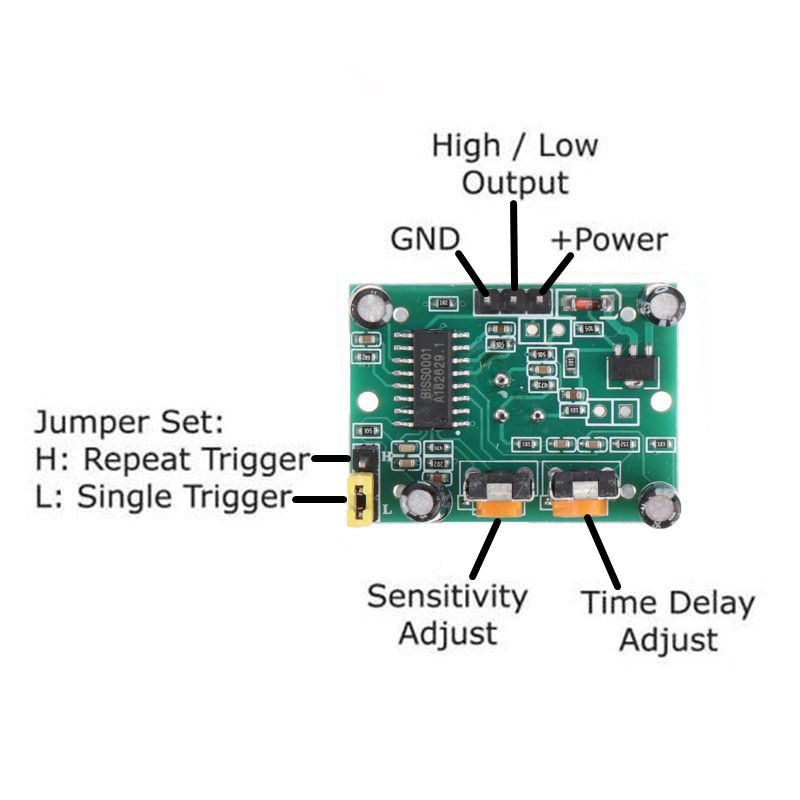
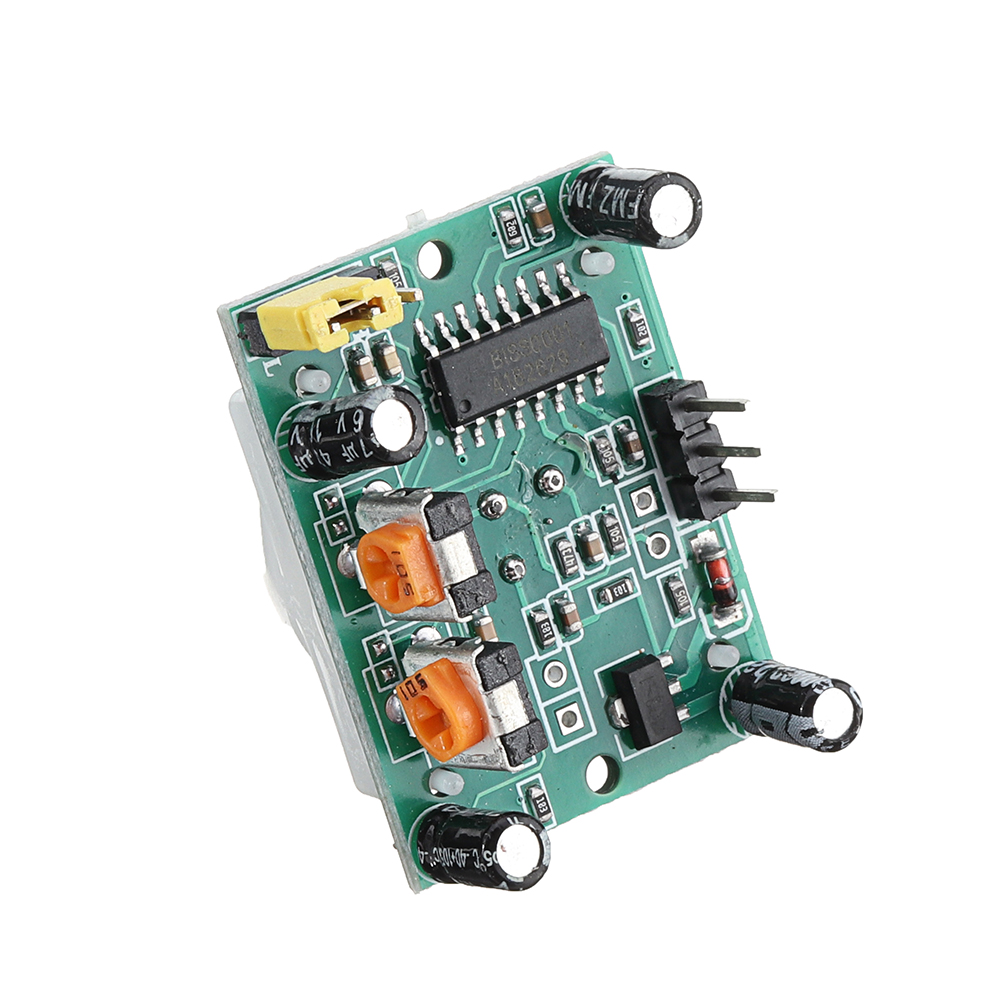
3. 두 가지 트리거 모드: L은 반복 불가능, H는 반복 가능. 점퍼를 선택할 수 있으며 기본값은 H입니다.
A. 반복 불가능한 트리거 모드: 유도 출력이 높고 지연 시간이 끝나면 출력이 자동으로 높음에서 낮음으로 변경됩니다.
B. 반복 트리거 모드: 즉, 인체가 감지하는 경우 지연 시간 동안 출력이 높게 감지된 후제한활동의, 그것의 출력은 사람이 높은 수준을 떠난 후 지연까지 높은 상태를 유지합니다. 수준이 낮은 수준으로 변경됩니다. (센싱 모듈은 인체의 모든 활동 후 자동으로 지연 시간을 지연하고 마지막 활동의 시간을 지연 시간의 시작점).
4. 유도 차단 시간(기본 설정: 3-4초): 각 감지 출력(높은 수준이 낮아짐) 후 감지 모듈은 감지되는 동안 차단 시간이 뒤따를 수 있습니다. 장치는 감지 신호를 수신하지 않습니다. . 이 기능은 감지 출력 시간과 차단 시간 사이의 간격을 달성하는 데 사용할 수 있습니다. 인터벌 감지 제품에 적용할 수 있습니다. 동시에 이 기능은 부하 전환 과정에서 모든 종류의 간섭을 효과적으로 억제할 수 있습니다.
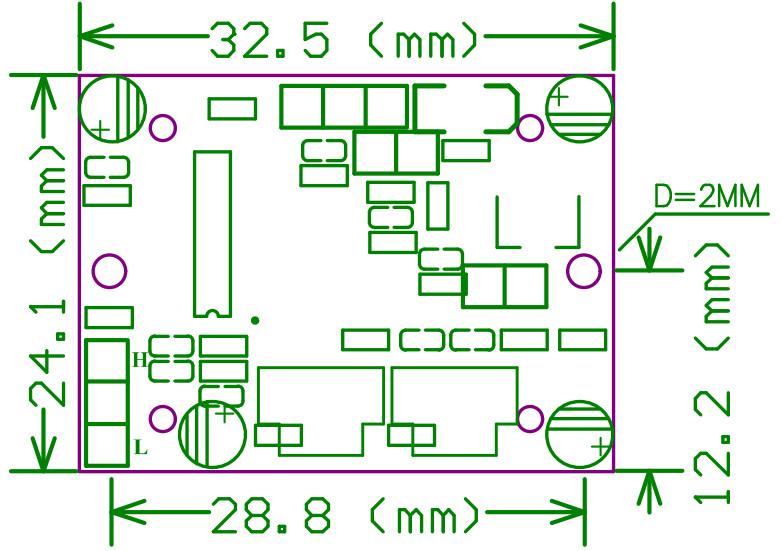
5. 넓은 작동 전압: 기본 작동 전압 DC5V ~ 20V.
6. 마이크로 전력: 대기 전류 65마이크로암페어, 특히 건식 배터리로 구동되는 전기 제품의 경우.
7. 높은 수준의 신호 출력: 도킹을 달성하기 위해 다양한 유형의 회로로 쉽게 할 수 있습니다.
사용 지침:
1. 유도 모듈 전원은 초기화 시간 약 1분 후, 이때 모듈은 대기 상태로 분당 0-3회 출력합니다.
2. 빛 및 기타 간섭을 피해야 합니다. 렌즈 모듈의 표면을 직접 닫아 신호에 간섭을 일으켜 오작동을 일으키지 않도록 합니다. 피하기 위해 가능한 한 환경의 사용
바람의 자유로운 흐름, 바람은 센서에 간섭을 일으킬 것입니다.
3. 듀얼 요소 프로브가있는 센서 모듈, 프로브 창은 직사각형, 양쪽 끝에서 더 긴 방향으로 듀얼 요소 (A 위안 B 위안), 본체가 왼쪽에서 오른쪽으로
또는 적외선 스펙트럼을 통해 오른쪽에서 왼쪽으로 이중 시간, 거리 차이, 차이가 클수록 더 민감한 유도, 몸이 정면에서 프로브로
헤드 또는 위에서 아래로 또는 아래에서 위로 방향으로 이중 요소는 적외선 스펙트럼 거리 변화를 감지할 수 없으며 차이가 없으므로 센서가 민감하지 않거나 작동하지 않습니다. 따라서 센서는 프로브의 방향이 이중이 되도록 설치해야 하며 신체가 통과했는지 확인하기 위해 인간 활동의 방향이 최대한 평행하도록 해야 합니다.
프로브 이중 요소 유도. 감지 각도를 높이려면제한, 이 모듈은 원형 렌즈를 사용하며 프로브 4면이 민감하지만 왼쪽과 오른쪽은 여전히
그러나 두 유도의 상하 방향에 비해제한, 감도, 설치는 여전히 위의 요구 사항에 따라 시도해야 합니다.
사용은 다음 사항에 주의해야 합니다.
1. DC 전압은 우리의 요구 사항을 충족해야 합니다. 너무 높거나 너무 낮으면 모듈의 성능에 영향을 미칠 뿐만 아니라 전원 공급 장치가 컴퓨터 USB 전원, 휴대폰 충전기 전원 공급 장치, 오래된 것과 같은 우수한 레귤레이터 필터여야 합니다. 9V 스택 배터리 모듈 작업 요구 사항을 충족할 수 없으므로 고객이 3단자 전압 조정기를 통해 전원 변압기와 조정기를 사용한 다음 220UF 및 0.1UF 커패시터 필터 전원 공급 장치를 통해 사용하는 것이 좋습니다.
2. 인체가 모듈 앞에 있지는 않지만 모듈에서 인체가 모듈에 너무 가깝더라도 센서 출력으로 인해 발생할 수 있으며 인체 디버깅은 회로 부분을 만지지 않습니다. 또한 모듈 작업에 영향을 미치며 보다 과학적인 접근 방식은 LED 또는 멀티미터를 출력하는 것입니다. 신문으로 덮인 모듈은 누군가가 방을 떠날 때 2분 동안 기다렸다가 모듈에 여전히 출력이 있는지 확인합니다.
3. 모듈이 부하를 제대로 작동시키지 않고 혼돈의 작업 후 부하에 연결됩니다. 한 가지 이유는 전력 용량이 부하 전력 소비가 매우 적고 부하가 모듈 오작동으로 인한 전압 변동으로 인해 발생하고 다른 하나는 이유는 부하입니다 전원은 릴레이 또는 전자석과 같은 작업에 간섭을 일으키고 다른 유도 부하는 역기전력을 생성하고 315M 방출 플레이트에는 전자기 복사가 있으며 다른 작업은 모듈에 영향을 미칩니다. 솔루션은 다음과 같습니다. A, 인덕터 필터의 전원 부분. B, 부하 및 모듈을 사용하여 다른 전압 방법을 사용하는 경우: 24V 작동 전압을 사용하는 부하, 모듈은 12V 작동 전압을 사용하며 그 동안 3단자 레귤레이터 절연을 사용합니다. C: 더 큰 용량의 전원 공급 장치를 사용하십시오.
4. 인체 센서 모듈은 실내에서만 작동할 수 있으며 작업 환경은 태양, 강한 직사광선 노출을 피해야 합니다. 작업 환경에 강한 RF 간섭이 있는 경우 차폐 조치를 사용할 수 있습니다. 강한 공기 간섭이 있는 경우 문과 창문을 닫거나 대류를 방지하십시오. 인덕션 부위는 발열기구와 물체를 마주하지 않고 바람이 잘 통하는 이물질이나 의류를 피한다.
5. 인체 센서 모듈은 밀봉된 상자에 설치하는 것이 좋습니다. 그렇지 않으면 출력 신호가 있을 수 있습니다.
6. 바디 센서 모듈 감지 각도가 90도 미만인 경우 불투명 접착 테이프를 사용하여 렌즈를 자르거나 렌즈를 절단하여 달성할 수 있습니다.
7. 이중 요소 프로브가 있는 인체 센서 모듈, 신체의 손과 발 및 머리의 움직임 방향과 센서의 감도는 밀접하게 연결되어 있으며 적외선 모듈은 센서의 특성을 결정하여 거리를 정확하게 제어할 수 없습니다.
8. 프로브의 모듈(PIR)은 회로 기판의 다른 면에 장착할 수 있습니다. 프로브는 2코어 차폐 케이블로 연장할 수도 있으며 길이도 20cm 미만이어야 합니다.