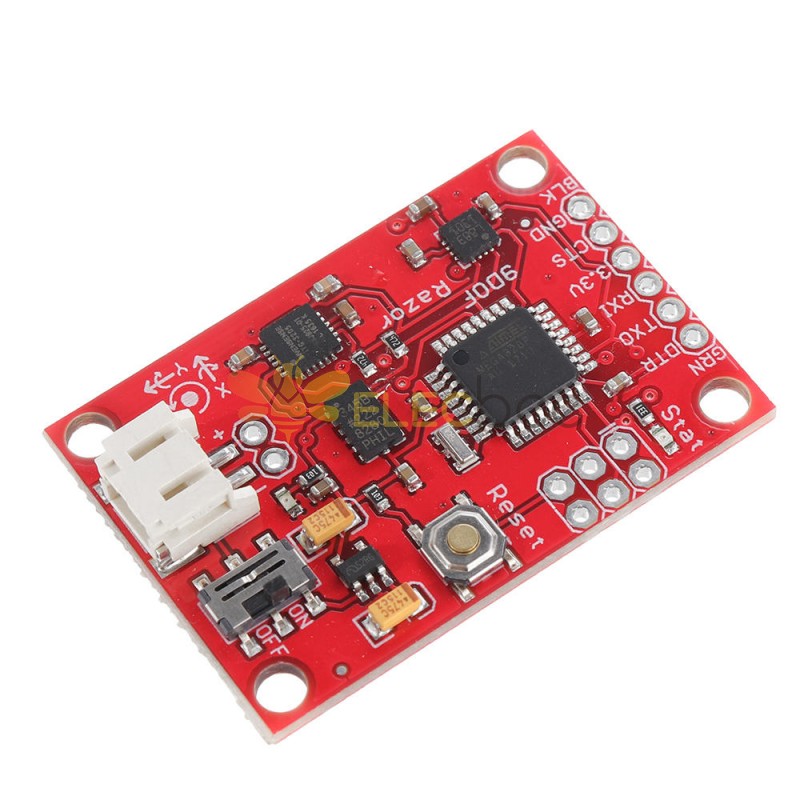



- 説明



標準校正:
パワーアップするのもいいかもしれませんかみそりキャリブレーションの数分前に、センサーがウォームアップできるようにします。 初めてセンサーを調整するのは少し難しいかもしれませんが、やってみましょう:
- /Razor_AHRS/Razor_AHRS.ino を for を使用して開き、「USER SETUP AREA」/「SENSOR CALIBRATION」セクションを見つけます。 これは、後でキャリブレーション値を配置する場所です。
- 接続するAHRS カミソリに正しいシリアル ポートを設定し、シリアルモニター.
ファームウェアのデフォルトを変更していない場合は、次のような出力が多数表示されるはずです。
#YPR=-155.73,-76.48,-129.51ファームウェアを設定する出力モードに較正文字列 #oc を送信します。 次のような出力が表示されるはずです。
加速度 x,y,z (最小/最大) = -5.00/-1.00 25.00/29.00 225.00/232.00
- 加速度計のキャリブレーション:
- 各軸の地球重力の最小出力値と最大出力値を見つけようとします。ボードを動かすときは、ボードに加える加速度ができるだけ小さくなるように、ゆっくりと動かしてください。純粋な重力だけが欲しい!
- ボードを持って、x 軸をまっすぐ下に向けます (x 軸 = コネクタ穴のある短辺に向かうことを思い出してください)。 そうしているうちに、x-maximum (2 番目の値) が大きくなっていくのがわかります。
- ボードを静止させ、#oc をもう一度送信して測定値をリセットします。
- 次に、値がそれ以上大きくならなくなるまでボードをあらゆる方向に少しずつ注意深く傾け、x-maximum 値を書き留めます。
- 反対側(x 軸が上向き)についても同じことを行い、x 最小値を取得します。位置を合わせ、#oc を送信して測定値をリセットし、x 最小値を見つけて書き留めます。
- z 軸 (上下) と y 軸 (左右) についても同じことを行います。
- ボードを激しく振ったり動かしたりして測定値を間違えたと思われる場合は、#oc を送信していつでもリセットできます。
- すべての最小値/最大値が表示されます。 それらを Razor_AHRS.ino に入れます。
- ノート: これを行うときは、本当に注意する必要があります。 ボードを指で軽くたたくだけでも、測定値が台無しになり (試してみてください!)、間違ったキャリブレーションにつながります。 #oc を頻繁に使用し、最小値と最大値を再確認してください)
磁力計のキャリブレーション:
- 今回は、ボードを好きなだけ振っても構いませんが、コンピューターやその他の電子機器や金属製の物体によって引き起こされる磁気歪みから離してください。
- まだありました校正モード加速度計用。 #on を送信すると、キャリブレーションが次磁力計であるセンサー。
- ノート:このセクションは参照用に残していますが、新しい「拡張磁力計キャリブレーション (参照)」を使用する必要があります。次のセクション) より良い結果が得られるからです! これをスキップして、ジャイロスコープを続けることができます。
- 各軸の地球磁場の最小出力値と最大出力値を見つけようとします。 これは基本的に、地球の磁場が真下を向いていないことを除けば、加速度計のキャリブレーションと同じように機能します。 地球上の現在の位置に応じて、特定の角度で北から上 (南半球) または北から下 (北半球) を指します。 この角度は傾斜. さらに、真の地理的北からのわずかなずれがある場合があります。赤緯. 見るウィキペディア. 以下の説明は、北半球で磁力計を校正していることを前提としています。
- ボードをコンパスのように平らに持ち、x 軸 (x 軸 = コネクタ穴に向かって前方) を北に向けます。 次に、東西軸を中心にボードを回転させ、下を向くようにします。 の x 最大値 (2 番目の値) を観察します。シリアルモニターボードの x 軸を地球の磁場に合わせたときに気付くでしょう。 そこで回転を止め、値がそれ以上大きくならなくなるまで、あらゆる方向に少し傾けます。
- 反対側でも同じことを行い、x 最小値を取得します。最初に北をポイントし、次に下をポイントします。
- 磁力計の場合、測定の間に #oc でリセットする必要はありません。
- z 軸 (上下) と y 軸 (左右) についても同じことを行います。
- 注: ボードの回転その周り測定する軸は問題ではなく、正しい方向を指しているだけです。 たとえば、z 軸の測定を開始するとき、x 軸が上か下か左か右かは関係ありません。
あなたは今、あなたの中にこのようなものを持っているはずですシリアルモニター:
倍率 x、y、z (最小/最大) = -564.00/656.00 -585.00/635.00 -550.00/564.00これらの値を Razor_AHRS.ino に入れます。
ジャイロスコープのキャリブレーション:
- 敷くかみそりまだテーブルの上にあります。
- まだありました校正モード磁力計用。 #on を送信すると、キャリブレーションが次ジャイロスコープであるセンサー。
- 10 秒間待ちます。かみそり.3 つの軸すべてでジャイロスコープのノイズを収集して平均化します。
次のような出力が得られるはずです。
ジャイロ x,y,z (現在/平均) = -29.00/-27.98 102.00/100.51 -5.00/-5.85- ボードを振ったり動かしたりして測定を台無しにしたと思われる場合は、#oc を送信してリセットできます。
- 各ペアの 2 番目の値を取り、Razor_AHRS.ino に入れます。
- 終わり :)
拡張磁力計キャリブレーション
- キャリブレーションを開始するには、センサーを後で使用する磁気環境に置きます。 オーディオ アプリケーションでヘッド トラッキングが必要な場合は、ヘッドフォンの正確な場所に配置します (ヘッドフォンには強力な磁石があり、キャリブレーション後にセンサーをあまり動かさないほど、結果が良くなります。ダミー マテリアルを配置することも検討する必要があります)。 イヤーカップの間に挿入して、通常の聞こえの位置にします)。
- センサーから読み取るすべてのアプリケーションを終了します (例:シリアルモニター、処理テスト スケッチ、…) を実行し、処理処理/Magnetometer_calibration にある磁力計キャリブレーション スケッチ。 実際、最初に EJML ライブラリをインストールする必要があります。そうしないと、スケッチが実行されません。 どうやってするか? をご覧くださいノートMagnetometer_calibration.pde の上部にあります。
すべての方向をカバーするようにセンサーを回転させて、球を多かれ少なかれ均等にカバーするドットを生成するようにしてください。
ほとんど歪みのない環境では、これは次のようになります。

SPACE キーを押して、Processingconsole - 「USER SETUP AREA」/「SENSOR CALIBRATION」の下のファームウェアに入力する必要があるコード行がいくつか見つかります。これで完了です。
収集されたデータ(ドット)は、スケッチ フォルダ内のファイル magnetom.float にも書き込まれます。 Matlab を所有している場合は、Matlab/magnetometer_calibration の下に magnetometer_calibration.m というスクリプトがあり、このファイルを使用していくつかのプロットを生成するため、キャリブレーションを視覚的に確認できます。
楕円体フィットと補正値:


別のキャリブレーションの例: 軟鉄は、スケーリングされ、楕円体に歪められた球を提供します。
サンプリングされた生の磁力計値:

楕円体フィットと補正値:






- レビュー (29)
- Q & A
-
: Elecbee製品の原産地はどこですか?認証されていますか?2023-03-03
-
回答:
Elecbeeは中国のOEM工場と長期的な協力契約を結んでいます。これにより中間チャネルのコストを削減し、費用を節約することができます。製品はすべて、関連するグローバル標準に厳密に従って製造されており、製品の互換性と優れた品質を保証しています。
2023-03-03
-
: どのような支払い方法が利用可能ですか?2023-03-03
-
回答:
当社の主要な支払い方法には、Paypal、クレジットカード、デビットカード、銀行振込などがあります。より詳細についてはお問い合わせください。お好みの支払い方法を選択してください。
2023-03-03
-
: いつ配送を手配しますか?2023-03-03
-
回答:
お支払いの受領を確認した後、できるだけ早く配送を手配し、ウェブサイトに配送業者の番号をアップロードして追跡できるようにします。
2023-03-03
-
: 交換または返品の方法は?2023-03-03
-
回答:
1.商品を受け取ってから30日以内に返品の申請をすることができます。外部の包装が破損していないこと、製品が元の状態であることを確認してください。当社が荷物を受け取ったら、該当する規定に従って返金を手配します。
2.返品の手順:返品の申請 - 返品が承認される - 返品が手配される - 商品を受け取って検査を行う - 返金が手配される。
3.当社のミスによる返品(品質問題など)については、送料を負担します。購入者による返品に
2023-03-03
関連商品

MH-Z19B アップグレード バージョン 0-5000PPM 赤外線 CO2 センサー CO2 室内空気質モニター UART/PWM