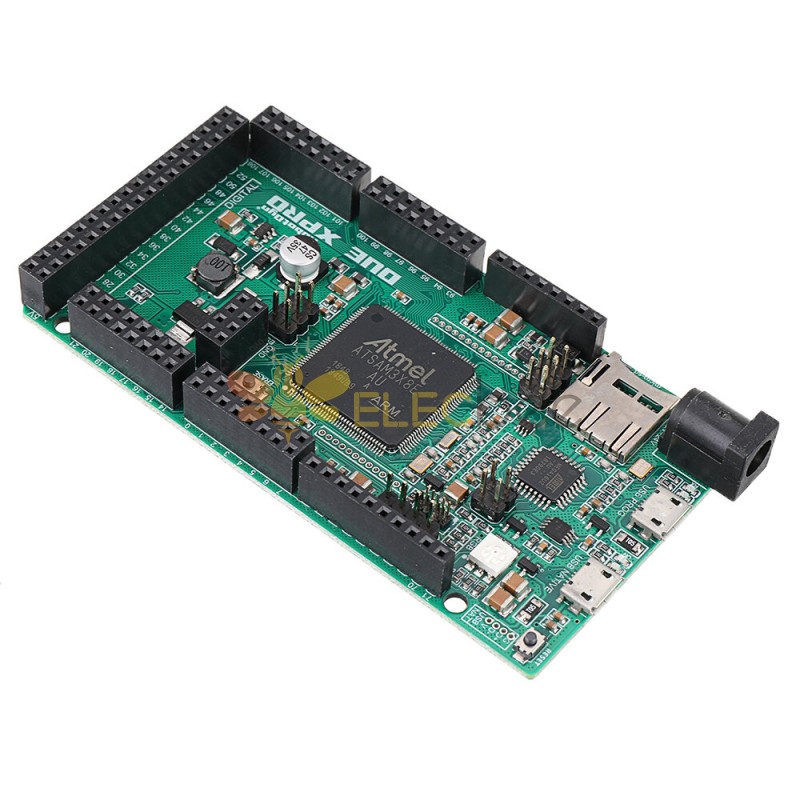
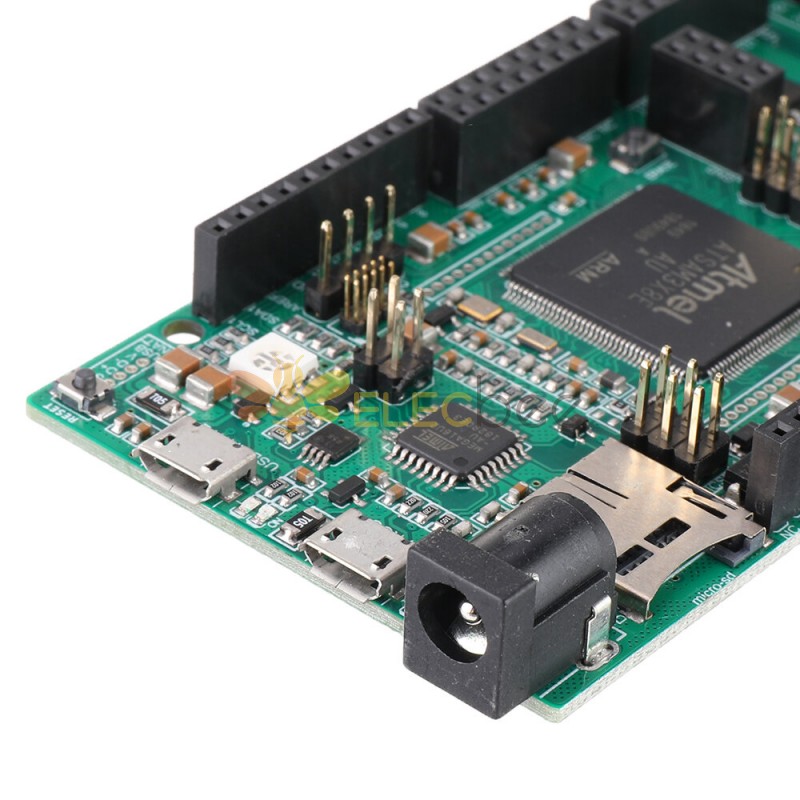
これは、SAM3X8E ARM Cortex-M3 ベースのマイクロコントローラー ボードです。 これは、32 ビット ARM コアに基づく数少ないボードの 1 つです。 通常の ArduinoDUO ボードのアップグレード版で、98 個のデジタル入力/出力 (元のモデルより 30 個多い)、12 個のアナログ入力、4 個の UART (ハードウェア シリアル ポート)、84 MHz クロック周波数、USB OTG 接続、2 個の DAC を備えています。 (D / A)、TWI、電源コネクタ、SPI ヘッダー、JTAG ヘッダー、リセット ボタン、消去ボタン。 ボード上には、Wi-Fi モジュール ESP-01 用の Micro-SD カード リーダーとソケットもあります。
コントローラは 3.3V ロジックレベルで動作します。 ボードには USB インターフェイスがあり、マイクロ USB ケーブルでコンピューターに接続するか、AC アダプターまたはバッテリーに接続するだけで使用を開始できます。 RobotDyn DUE XPRO は、すべての Arduino 対応デバイスと互換性があります。
IOREF:
接続されたディスプレイが正しい構成でボードによって提供される電圧に適応できるようにします。 これにより、画面は、5 V で動作する Due や AVR ボードなどの 3.3 V ボードと互換性があることが保証されます。
力:
RobotDyn DUEXPRO は、USB コネクタまたは外部電源から電力を供給できます。 電源は自動的に選択されます。 外部 (非 USB) 電源は、AC アダプターから直流またはバッテリーから供給できます。 アダプターは、カードの電源コネクターに 2.1 mm センター プラス プラグを挿入することで接続できます。 バッテリ ピンは、POWER コネクタの GND ピンと VIN ピンに差し込むことができます。 ボードは 6 ~ 20 ボルトの外部電源で動作します。推奨範囲は 7 ~ 12 ボルトです。 電源ピンは次のとおりです。
VIN - 外部電源を使用する場合の Arduinoboard の入力電圧 (USB 接続からの 5 ボルトとは対照的に)。 この接点を介してボードに電力を供給するか、USB ケーブル経由で電力を供給している場合はボードにアクセスできます。
5V - このピン出力は、調整可能な電圧レギュレータを使用してボードに 5V の電流を供給します。 ボードには、DC 電源コネクタ (7 ~ 12 V)、USB コネクタ (5 V)、またはボード上の VIN ピン (7 ~ 12 V) から電力を供給できます。 5 V または 3.3 V ピンを介して電圧を印加するとレギュレータがバイパスされるため、電圧が安定していて許容範囲内であることを確認してください。
3V - 内蔵レギュレータから 3.3V の電源を供給します。 最大消費電流は 800mA です。 このコントローラは、SAM3X マイクロコントローラにも電力を供給します。
GND – 接地ピン。
IOREF - DUEXPRO ボードのこのピンは、マイクロコントローラが動作する基準ソースを提供します。 適切に構成された画面では、IOREF 接点の電圧を読み取り、適切な電源を選択するか、出力で電圧コンバータをオンにして、5V または 3.3V で動作させることができます。
メモリー:
SAM3X には、コードを格納するための 512 KB (256 KB の 2 ブロック) のフラッシュ メモリがあります。 ボードには、事前に焼き付けられたブートローダーが付属しています。 利用可能な SRAM は、64 KB と 32 KB の 2 つの隣接するバンクで 96 KB です。 使用可能なすべてのメモリ (フラッシュ、RAM、および ROM) は、単一のアドレス空間として直接アクセスできます。 内蔵の消去ボタンを使用して、SAM3X フラッシュ メモリを消去できます。 これにより、現在ロードされているサムネイルが MCU から削除されます。 メモリを消去するには、ボードの電源が入っている間に「消去」ボタンを数秒間押し続けます。入力と出力:
デジタル I/O: 合計 98。DUEXPRO の 98 個のデジタル ピンのそれぞれは、pinMode ()、digitalWrite ()、および digitalRead () 関数を使用して、入力または出力として使用できます。 それらは 3.3V ロジックレベルで動作します。 各出力は、出力に応じて、3 mA または 15 mA の電流を供給したり、6 mA または 9 mA の電流を消費したりできます。 また、100 kΩ の内部プルアップ抵抗 (デフォルトでは無効) も備えています。 さらに、一部の連絡先には特殊な機能があります。
シリアル: 0 (RX) および 1 (TX)
シリアル 1: 19 (RX) および 18 (TX)
シリアル 2: 17 (RX) および 16 (TX)
シリアル 3: 15 (RX) および 14 (TX)
PWM: 2 ~ 13 のピン analogWrite () 関数を使用して 8 ビットの PWM 出力を提供します。 PWM 解像度は、analogWriteResolution () 関数を使用して変更できます。
SPI: SPI ヘッダー ピンは、SPI ライブラリを使用した SPI 通信をサポートします。 SPI ピンには、Uno、Leonardo、および Mega2560 と物理的に互換性のある中央の 6 ピン コネクタがあります。 SPI ヘッダーは、他の SPI デバイスとの通信にのみ使用でき、インサーキット シリアル プログラミング テクノロジを使用した SAM3X プログラミングには使用できません。
CAN: CANRX および CANTX ピンは CAN 通信プロトコルをサポートします。
I2C TWI 1: 20 (SDA) および 21 (SCL)
I2C TWI 2: SDA1 および SCL1 Wire ライブラリを使用して TWI 通信をサポートします。 SDA1 と SCL1 は、Wire ライブラリが提供する Wire1 クラスを使用して制御できます。 SDA と SCL には内部プルアップ抵抗がありますが、SDA1 と SCL1 にはありません。 Wire1 を使用するには、SDA1 ラインと SCL1 ラインに 2 つのプルアップ抵抗を追加する必要があります。
アナログ入力: A0 から A11 までの接点。 Due には 12 のアナログ入力があり、それぞれが 12 ビットの分解能 (つまり、4096 の異なる値) を提供できます。 デフォルトでは、読み取りの分解能は、他の Arduino ボードとの互換性のために 10 ビットに設定されています。 ReadResolution () を使用して、ADC の解像度を変更できます。 DUEXPRO の接点に 3.3 V を超える電圧を印加すると、SAM3X チップが損傷する可能性があります。 AnalogReference () 関数は、DUEXPRO では無視されます。 AREF ピンは、ブリッジ抵抗を介して SAM3X アナログ リファレンス ピンに接続されます。 AREF ピンを使用するには、抵抗 BR1 をボードから切断する必要があります。
DAC1 および DAC2: これらのピンは、analogWrite () 関数を使用して、12 ビット分解能 (4096 レベル) の真のアナログ出力を提供します。 これらは、オーディオ ライブラリを使用してオーディオ出力を作成するために使用できます。 DAC の出力範囲は、実際には 0.55 V ~ 2.75 V のみであることに注意してください。 ボード上のその他のピン: AREF アナログ入力の基準電圧。 AnalogReference () と共に使用します。
リセット: このラインを LOW に設定して、マイクロコントローラーをリセットします。 通常、ボード上のボタンをブロックするシールドにリセット ボタンを追加するために使用されます。
コミュニケーション:
RobotDyn DUE XPRO には、コンピューター、別の Arduinoboard または他のマイクロコントローラー、および電話、タブレット、カメラなどのさまざまなデバイスと通信するための多くの手段があります。SAM3X は、TTL シリアル用に 1 つのハードウェア UART と 3 つのハードウェア USART を提供します。 コミュニケーション。
プログラミング ポートは ATmega16U2 に接続され、接続されたコンピューター上のソフトウェアに仮想 COM ポートを提供します (Windows ではデバイスを認識するために .inf ファイルが必要ですが、OSX および Linux マシンはボードを COM ポートとして自動的に認識します)。 16U2 は、ハードウェア UART SAM3X にも接続されています。 RX0 および TX0 ピンのシリアル接続は、ATmega16U2 マイクロコントローラーを介してボードをプログラミングするために、シリアル ポートと USB 間の通信を提供します。 Arduino ソフトウェアには、ボードとの間で簡単なテキスト データを送受信できるシリアル モニターが含まれています。 ボード上の RX および TX インジケータは、ATmega16U2 チップおよび USB 接続を介してコンピュータにデータを送信するときに点滅します。
USB ポートは SAM3X に接続されており、USB 経由のシリアル通信が可能です。 これにより、コンピュータ上のシリアル モニタまたはその他のアプリケーションへのシリアル接続が提供され、接続されたコンピュータに対して USB マウスまたはキーボードをエミュレートすることもできます。
ネイティブ USB ポートは、マウス、キーボード、スマートフォンなどの周辺機器を接続するための USB ホストとしても機能します。 これらの機能を使用するには、USBHost のマニュアル ページを参照してください。
SAM3X は、TWI および SPI 通信もサポートしています。 Arduinoソフトウェアには、TWIバスの使用を簡素化するWireライブラリが含まれています。 SPI 通信には SPI ライブラリを使用します。
プログラミング:
DUEXPRO は、ArduinoIDE を使用してプログラムできます。 SAM3X へのサムネイルのアップロードは、他の Arduino ボードにある AVR マイクロコントローラーとは異なります。これは、再度プログラムする前にフラッシュ メモリを消去する必要があるためです。 チップのブートは、チップのフラッシュ メモリが空の場合にのみ開始される SAM3X 上の ROM によって制御されます。 USB ポートのいずれかを使用してボードをプログラムできますが、チップが消去される方法のためにプログラミング ポートを使用することをお勧めします。
プログラミング ポート: このポートを使用するには、ArduinoIDE の [ツール] メニューでボードとして [ArduinoDue (ProgrammingPort)] を選択します。 DUEXPRO プログラミング ポート (DC 電源コネクタに最も近い) をコンピュータに接続します。 プログラミング ポートは、最初の SAM3X UART (RX0 および TX0) に接続された USB-シリアル チップとして 16U2 を使用します。 16U2 には、SAM3X のリセットおよび消去接点に接続された 2 つのピンがあります。 1200 bps で接続されたプログラミング ポートを開閉すると、SAM3X チップの「ハード消去」手順が開始され、UART との接続を確立する前に、SAM3X の消去およびリセット接点がアクティブになります。 これは、推奨されるプログラミング ポートです。 これは、独自のポートで発生する「ソフト消去」よりも信頼性が高く、メイン MCU が故障した場合でも機能するはずです。
独自のポート: このポートを使用するには、ArduinoIDE でボードとして「ArduinoDue (NativeUSBPort)」を選択します。 ネイティブ USB ポートは SAM3X に直接接続されています。 自分の USB ポート Due (リセット ボタンに最も近い) をコンピュータに接続します。 1200 bps で独自のポートを開閉すると、「ソフト消去」手順が開始されます。フラッシュ メモリが消去され、ボードがブートローダーで再起動します。
ダウンロードに avrdude を使用する他の Arduino ボードとは異なり、DUEXPRO は Bossac に依存しています。 ATmega16U2 ファームウェアのソース コードは、Arduino レポジトリで入手できます。 外部プログラマーで ISP ヘッダーを使用できます (DFU ブートローダーを上書きします)。 USB 経由での過電流に対する保護 RobotDyn DUEXPRO には、コンピュータの USB ポートを短絡や過負荷から保護するリロード可能なポリヒューズがあります。 ほとんどのコンピュータには独自の内部保護機能がありますが、ヒューズは追加の保護レベルを提供します。 USB ポートに 500 mA を超える電流が接続されている場合、短絡または過負荷が解消されるまで、ヒューズは自動的に接続を切断します。 3 つのネジ穴により、ボードを表面またはハウジングに取り付けることができます。 デジタル ピン 7 と 8 の間の距離は 160 ミル (0.16 インチ) であり、他のピンからの 100 ミルの倍数ではないことに注意してください。 RobotDyn DUEXPRO は、Uno、Diecimila、またはこのデジタル ピン 0 ~ 13 (および隣接するピン AREF と GND)、アナログ入力 0 ~ 5、電源ヘッダーおよび ICSP ヘッダー (SPI) に関連して設計されたほとんどの画面と互換性があるように設計されています。 同等の場所で。 さらに、メインの UART (シリアル ポート) は同じピン (0 と 1) にあります。ドキュメント:
寸法図:ここをクリックして開きます
回路図: ここをクリックして開きます