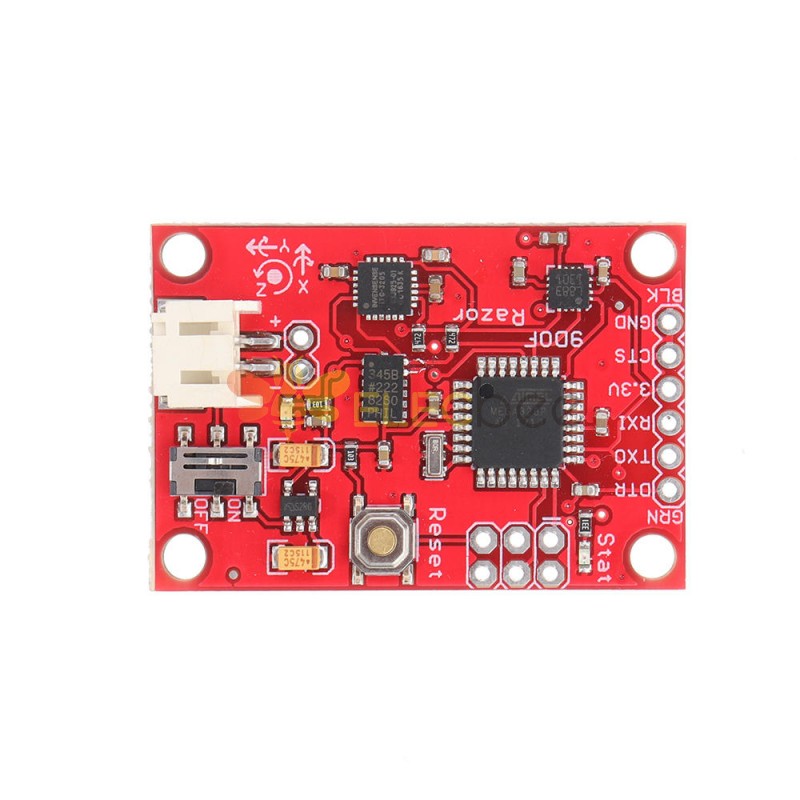
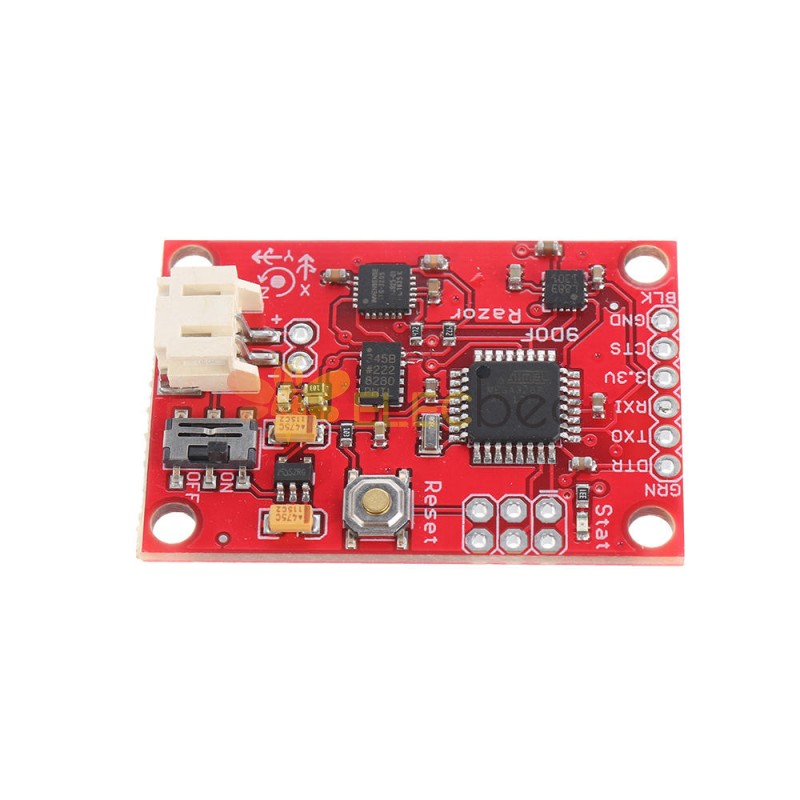
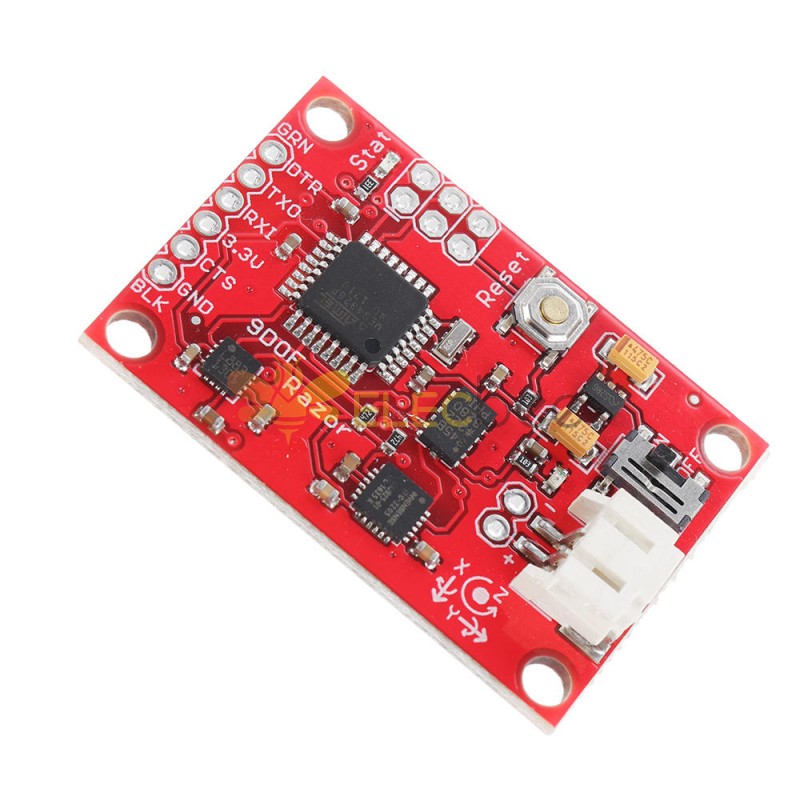
Modulo sensore Atmega328 a 9 assi IMU AHRS ITG3200/ITG3205 Gyro ADXL345 Accelerometro HMC5883L Magnetometro 3-5 V CC per Arduino - prodotti compatibili con schede Arduino ufficiali



- Descrizione



Calibrazione standard:
Potrebbe essere utile accendere ilRasoioalcuni minuti prima della calibrazione, in modo che i sensori possano riscaldarsi. Calibrare i sensori la prima volta può essere un po' complicato, ma andiamo:
- Apri per /Razor_AHRS/Razor_AHRS.ino usando for e individua la sezione "AREA DI CONFIGURAZIONE UTENTE" / "CALIBRAZIONE SENSORE". Qui è dove si inseriscono successivamente i valori di calibrazione.
- Collega ilRasoi AHRSal tuo computer, imposta la porta seriale corretta per e apri il fileMonitor seriale.
Se non hai modificato le impostazioni predefinite del firmware, dovresti vedere un sacco di output come questo:
#YPR=-155.73,-76.48,-129.51Imposta il firmwaremodalità di uscitaAcalibrazioneinviando la stringa #oc. Ora dovresti vedere un output come questo:
accelerazione x,y,z (min/max) = -5.00/-1.00 25.00/29.00 225.00/232.00
- Calibrazione dell'accelerometro:
- Cercheremo di trovare i valori di output minimo e massimo per la gravitazione terrestre su ciascun asse.Quando muovi la tavola, muovila molto lentamente, in modo che l'accelerazione che le applichi sia la più piccola possibile.Vogliamo solo pura gravità!
- Prendi la scheda e punta verso il basso con l'asse x (ricorda: asse x = verso il lato corto con i fori del connettore). Mentre lo fai, puoi vedere l'x massimo (il secondo valore) aumentare.
- Tieni la scheda molto ferma e reimposta la misurazione inviando di nuovo #oc .
- Ora inclina leggermente la scacchiera in ogni direzione fino a quando il valore non aumenta più e annota il valore x-massimo.
- Fai la stessa cosa per il lato opposto (asse x rivolto verso l'alto) per ottenere il minimo x: porta in posizione, invia #oc per ripristinare la misurazione, trova il valore minimo x e annotalo.
- Fai la stessa cosa per l'asse z (su e giù) e l'asse y (destra e sinistra).
- Se ritieni di aver sbagliato la misurazione scuotendo o muovendo la tavola troppo velocemente, puoi sempre reimpostare inviando #oc.
- Ora dovresti avere tutti i valori min/max. Inseriscili in Razor_AHRS.ino.
- NOTA: Devi stare molto attento quando lo fai! Anche picchiettare leggermente la scheda con il dito incasina la misurazione (provalo!) E porta a una calibrazione errata. Usa #oc molto spesso e ricontrolla i valori min/max)
Taratura del magnetometro:
- Questa volta puoi scuotere la tavola quanto vuoi, ma allontanala dalle distorsioni magnetiche introdotte da computer e altri dispositivi elettronici e oggetti metallici.
- Erano ancoramodalità di calibrazioneper l'accelerometro. Invia #on, che sposterà la calibrazione al fileProssimosensore, che è il magnetometro.
- NOTA:Questa sezione rimane qui come riferimento, ma dovresti usare la più recente "Calibrazione estesa del magnetometro (vedisezione successiva) in quanto produce risultati molto migliori! Puoi saltare questo passaggio e continuare con il giroscopio.
- Cercheremo di trovare i valori di uscita minimo e massimo per il campo magnetico terrestre su ciascun asse. Fondamentalmente funziona come calibrare l'accelerometro, tranne per il fatto che il campo magnetico terrestre non punta dritto verso il basso. A seconda di dove ti trovi attualmente sul pianeta, punta verso nord e verso l'alto (emisfero sud) o verso nord e verso il basso (emisfero nord) con una certa angolazione. Questo angolo è chiamatoinclinazione. Inoltre potrebbe esserci una piccola deviazione dal vero nord geografico, che viene chiamatodeclinazione. VedereWikipedia. La seguente descrizione presuppone che tu stia calibrando il magnetometro nell'emisfero settentrionale.
- Tieni la tavola piatta come una bussola con l'asse x (ricorda: asse x = avanti, verso i fori del connettore) rivolto a nord. Quindi inizia a ruotare la tavola attorno all'asse est-ovest in modo che inizi a puntare verso il basso. Osservare il massimo x (il secondo valore) inMonitor serialee noterai quando hai allineato l'asse x della tavola con il campo magnetico terrestre. Smetti di ruotare lì e di nuovo inclinati leggermente in ogni direzione fino a quando il valore non aumenta più.
- Fai la stessa cosa per il lato opposto per ottenere l'x-minimo: prima punta a nord, poi in basso.
- Per il magnetometro non è necessario reimpostare con #oc tra le misurazioni.
- Fai la stessa cosa per l'asse z (su/giù) e l'asse y (sinistra/destra).
- NOTA: la rotazione della schedain girol'asse che vuoi misurare non ha importanza, solo che punta nella direzione corretta. Ad esempio, quando inizi a misurare l'asse z, non importa se l'asse x punta in alto o in basso o a sinistra oa destra.
Ora dovresti avere qualcosa di simile nel tuoMonitor seriale:
magn x,y,z (min/max) = -564.00/656.00 -585.00/635.00 -550.00/564.00Inserisci questi valori in Razor_AHRS.ino.
Calibrare il giroscopio:
- Posare ilRasoioancora sul tavolo.
- Erano ancoramodalità di calibrazioneper il magnetometro. Invia #on, che sposterà la calibrazione al fileProssimosensore, che è il giroscopio.
- Attendere 10 secondi e non spostare ilRasoio.Raccoglierà e farà la media del rumore del giroscopio su tutti e tre gli assi.
Ora dovresti avere un output simile a questo:
giroscopio x,y,z (corrente/media) = -29,00/-27,98 102,00/100,51 -5,00/-5,85- Se ritieni di aver sbagliato la misurazione scuotendo o spostando la scheda, puoi reimpostare inviando #oc.
- Prendi i secondi valori di ogni coppia e inseriscili in Razor_AHRS.ino.
- Fatto :)
Calibrazione estesa del magnetometro
- Per avviare la calibrazione, posizionare il sensore nell'ambiente magnetico in cui verrà utilizzato in seguito, ad es. nel punto esatto delle tue cuffie, se hai bisogno di tracciare la testa per applicazioni audio (le cuffie hanno potenti magneti, meno muovi il sensore dopo la calibrazione, migliori saranno i risultati; dovresti anche pensare di mettere del materiale fittizio tra i padiglioni auricolari per portarli nella normale posizione uditiva).
- Chiudere tutte le applicazioni che leggono dal sensore (ad es.Monitor seriale,in lavorazionetest sketch, …) ed eseguire il filein lavorazioneschizzo di calibrazione del magnetometro che si trova in Processing/Magnetometer_calibration. In effetti, devi prima installare la libreria EJML, altrimenti lo sketch non verrà eseguito. Come farlo? Dai un'occhiata alNOTAnella parte superiore di Magnetometer_calibration.pde.
Prova a ruotare il sensore in modo da coprire tutti gli orientamenti in modo da produrre punti che coprano più o meno uniformemente la sfera.
In un ambiente per lo più non distorto, questo potrebbe assomigliare a questo:

Premi SPAZIO e guarda ilin lavorazioneconsole: troverai alcune righe di codice che devi inserire nel firmware in "AREA DI CONFIGURAZIONE UTENTE" / "CALIBRAZIONE SENSORE" e il gioco è fatto.
I dati raccolti (i punti) vengono scritti anche in un file magnetom.float nella cartella dello schizzo. Ora, se possiedi Matlab, in Matlab/magnetometer_calibration troverai uno script chiamato magnetometer_calibration.m che utilizza questo file e produce alcuni grafici per te, in modo da poter controllare visivamente la calibrazione.
Adattamento dell'ellissoide e valori corretti:


Un altro esempio di calibrazione: il ferro dolce dà una sfera ridimensionata e distorta in un ellissoide.
Valori grezzi del magnetometro campionati:

Adattamento dell'ellissoide e valori corretti:






- Recensioni (29)
- Domande e risposte
-
Qual è l'origine dei prodotti Elecbee? Sono certificati?2023-03-03
-
Risposta:
Elecbee ha accordi di collaborazione a lungo termine con le fabbriche OEM in Cina. Ciò ci consente di ridurre il costo del canale intermedio e di aiutare a risparmiare denaro. Tutti i nostri prodotti sono realizzati in conformità alle pertinenti norme globali, per garantire una buona compatibilità e una qualità eccellente dei prodotti.
2023-03-03
-
Quali forme di pagamento accettate?2023-03-03
-
Risposta:
I nostri principali metodi di pagamento includono Paypal, carte di credito, carte di debito, bonifico bancario e molto altro da scoprire. Scegliete i metodi di pagamento che preferite.
2023-03-03
-
Quando organizzerai la spedizione?2023-03-03
-
Risposta:
Dopo aver confermato la ricezione del pagamento, organizzeremo la consegna il prima possibile e caricheremo il numero di tracciamento sul sito web per consentirti di monitorarlo.
2023-03-03
-
Come effettuare un cambio o un reso?2023-03-03
-
Risposta:
1.Puoi richiedere un reso entro 30 giorni dalla ricezione della merce. Assicurati che la confezione esterna sia intatta e il prodotto sia nelle sue condizioni originali. Provvederemo al rimborso secondo le disposizioni pertinenti non appena riceveremo il pacchetto.
2.Procedura di reso: Richiesta di reso - Approvazione del reso - Organizzazione del reso - Ricezione dei prodotti e ispezione - Rimborso.
3.Ci assumeremo le spese di trasporto per i resi causati da noi, ad esempio a causa di problemi di qualità. Per i resi causati dall'acquirente, l'acquirente dovrebbe essere responsabile della spesa di spedizione.
2023-03-03
Articoli correlati

MH-Z19B Aggiornamento versione 0-5000PPM Sensore di CO2 a infrarossi per monitor di qualità dell'aria interna CO2 UART/PWM

5pcs W1308H LED Microcomputer Display digitale Regolatore di temperatura Termostato regolabile Regolatore di tempo intelligente 12V
20 pz APDS-9960 Modulo Sensore di Gesto Sensore di Luce RGB Digitale per Arduino