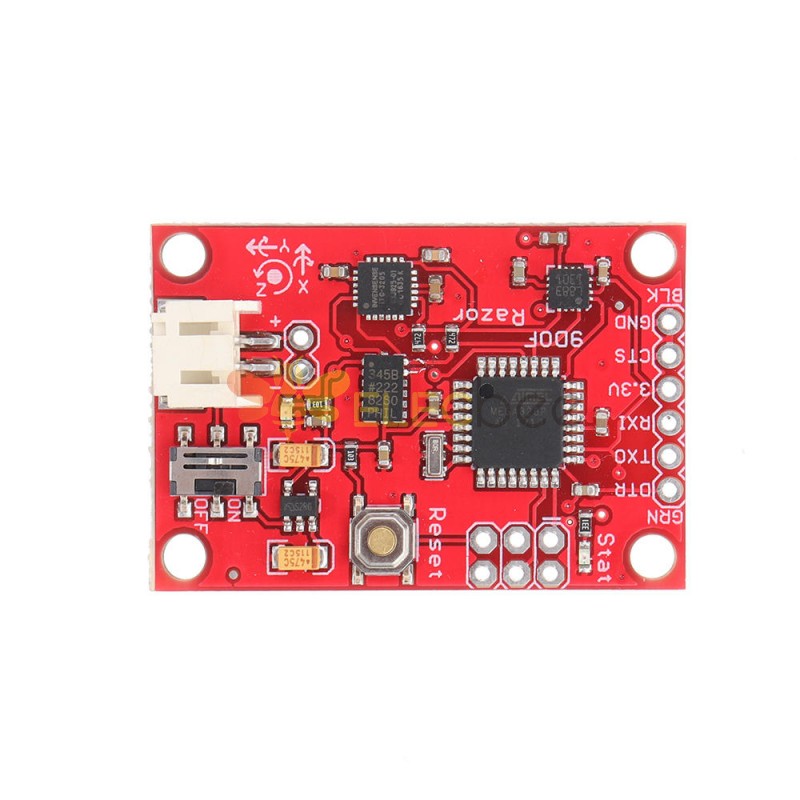
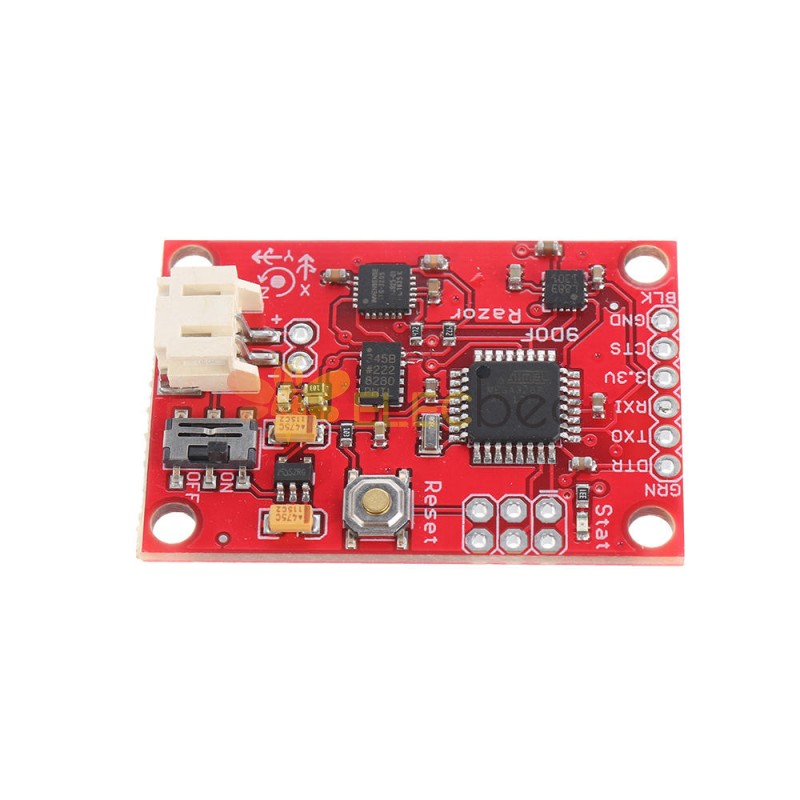
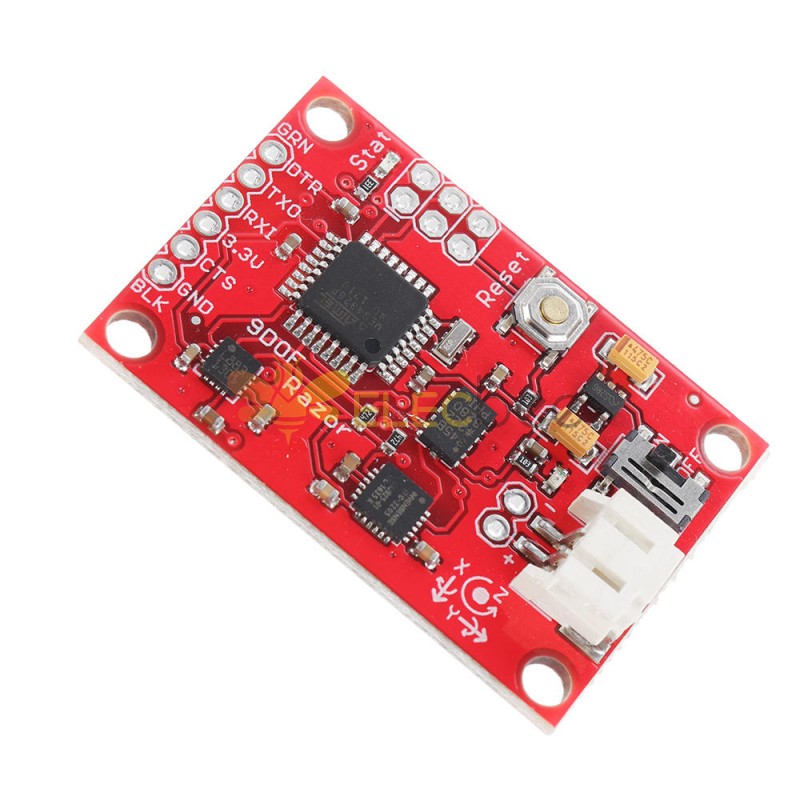
9-Achsen-Atmega328-Sensormodul IMU AHRS ITG3200/ITG3205 Gyro ADXL345 Beschleunigungsmesser HMC5883L Magnetometer 3–5 V DC für Arduino – Produkte, die mit offiziellen Arduino-Boards funktionieren



- Produktdetails



Standardkalibrierung:
Es könnte gut sein, die einzuschaltenRasierereinige Minuten vor der Kalibrierung, damit sich die Sensoren aufwärmen können. Das erstmalige Kalibrieren der Sensoren kann etwas knifflig sein, aber los geht's:
- Öffnen Sie für /Razor_AHRS/Razor_AHRS.ino unter Verwendung von und finden Sie den Abschnitt "USER SETUP AREA" / "SENSOR CALIBRATION". Hier legen Sie später die Kalibrierwerte ab.
- Verbinden Sie dieAHRS-Rasiereran Ihren Computer, stellen Sie den richtigen seriellen Anschluss für ein und öffnen Sie dieSerieller Monitor.
Wenn Sie die Firmware-Standardeinstellungen nicht geändert haben, sollten Sie viele Ausgaben wie diese sehen:
#YPR=-155,73,-76,48,-129,51Stellen Sie die Firmware einAusgabemodusZuKalibrierungindem Sie die Zeichenfolge #oc senden. Sie sollten jetzt eine Ausgabe wie diese sehen:
Beschleunigung x,y,z (min/max) = -5,00/-1,00 25,00/29,00 225,00/232,00
- Kalibrieren des Beschleunigungssensors:
- Wir werden versuchen, die minimalen und maximalen Ausgabewerte für die Erdgravitation auf jeder Achse zu finden.Wenn Sie das Brett bewegen, bewegen Sie es sehr langsam, damit die Beschleunigung, die Sie darauf anwenden, so gering wie möglich ist.Wir wollen nur die reine Schwerkraft!
- Nehmen Sie die Platine und zeigen Sie mit der x-Achse gerade nach unten (denken Sie daran: x-Achse = zur kurzen Kante mit den Verbindungslöchern). Während Sie das tun, können Sie sehen, wie das x-Maximum (der zweite Wert) größer wird.
- Halten Sie das Board ganz ruhig und setzen Sie die Messung zurück, indem Sie erneut #oc senden.
- Kippen Sie nun vorsichtig die Platine ein wenig in alle Richtungen, bis der Wert nicht mehr größer wird und notieren Sie den x-Maximalwert.
- Machen Sie dasselbe für die gegenüberliegende Seite (x-Achse zeigt nach oben), um die x-Mini-Mum zu erhalten: Bringen Sie sie in Position, senden Sie #oc , um die Messung zurückzusetzen, finden Sie den x-Mini-Mum-Wert und schreiben Sie ihn auf.
- Machen Sie dasselbe für die z-Achse (nach unten und oben) und die y-Achse (rechts und links).
- Wenn Sie der Meinung sind, dass Sie die Messung durch zu schnelles Schütteln oder Bewegen des Boards vermasselt haben, können Sie es jederzeit zurücksetzen, indem Sie #oc senden.
- Sie sollten jetzt alle Min/Max-Werte haben. Fügen Sie sie in Razor_AHRS.ino ein.
- NOTIZ: Sie müssen dabei wirklich vorsichtig sein! Schon ein leichtes Antippen der Platine mit dem Finger bringt die Messung durcheinander (probieren Sie es aus!) und führt zu einer falschen Kalibrierung. Verwenden Sie #oc sehr oft und überprüfen Sie Ihre Min/Max-Werte.)
Kalibrieren des Magnetometers:
- Dieses Mal können Sie das Board so stark schütteln, wie Sie möchten, aber bewegen Sie es weg von magnetischen Verzerrungen, die durch Computer und andere elektronische Geräte und Metallgegenstände verursacht werden.
- Wir sind immernochKalibriermodusfür den Beschleunigungssensor. Senden Sie #on, wodurch die Kalibrierung nach verschoben wirdnächsteSensor, das ist das Magnetometer.
- NOTIZ:Dieser Abschnitt bleibt hier als Referenz, aber Sie sollten die neuere "Erweiterte Magnetometerkalibrierung (siehenächsten Abschnitt), da es viel bessere Ergebnisse liefert! Sie können dies überspringen und mit dem Gyroskop fortfahren.
- Wir werden versuchen, die minimalen und maximalen Ausgabewerte für das Erdmagnetfeld auf jeder Achse zu finden. Dies funktioniert im Grunde wie das Kalibrieren des Beschleunigungsmessers, nur dass das Magnetfeld der Erde nicht gerade nach unten zeigt. Je nachdem, wo auf dem Planeten Sie sich gerade befinden, zeigt es in einem bestimmten Winkel nach Norden und oben (südliche Hemisphäre) oder nach Norden und unten (nördliche Hemisphäre). Dieser Winkel heißtNeigung. Außerdem kann es eine winzige Abweichung vom wahren geografischen Norden geben, die als bezeichnet wirdDeklination. SehenWikipedia. Die folgende Beschreibung geht davon aus, dass Sie das Magnetometer auf der Nordhalbkugel kalibrieren.
- Halten Sie die Platine flach wie einen Kompass, wobei die x-Achse (denken Sie daran: x-Achse = vorwärts, in Richtung der Verbindungslöcher) nach Norden zeigt. Beginnen Sie dann, das Brett um die Ost-West-Achse zu drehen, sodass es nach unten zeigt. Beachten Sie das x-Maximum (den zweiten Wert) in derSerieller Monitorund Sie werden es bemerken, wenn Sie die x-Achse der Tafel mit dem Magnetfeld der Erde ausgerichtet haben. Hören Sie dort auf zu drehen und kippen Sie wieder ein wenig in alle Richtungen, bis der Wert nicht mehr größer wird.
- Machen Sie dasselbe für die gegenüberliegende Seite, um die x-mini-Mutter zu erhalten: Zeigen Sie zuerst nach Norden, dann nach unten.
- Für das Magnetometer müssen wir zwischen den Messungen nicht mit #oc zurücksetzen.
- Machen Sie dasselbe für die z-Achse (oben/unten) und die y-Achse (links/rechts).
- HINWEIS: Die Drehung des Brettsumdie zu messende Achse spielt keine Rolle, nur dass sie in die richtige Richtung zeigt. Wenn Sie z. B. mit der Messung der z-Achse beginnen, spielt es keine Rolle, ob die x-Achse nach oben oder unten oder nach links oder rechts zeigt.
Sie sollten jetzt so etwas in Ihrem habenSerieller Monitor:
Größe x,y,z (min/max) = -564,00/656,00 -585,00/635,00 -550,00/564,00Fügen Sie diese Werte in Razor_AHRS.ino ein.
Kalibrieren des Gyroskops:
- Leg dasRasierernoch auf dem Tisch.
- Wir sind immernochKalibriermodusfür das Magnetometer. Senden Sie #on, wodurch die Kalibrierung nach verschoben wirdnächsteSensor, der das Gyroskop ist.
- Warten Sie 10 Sekunden und bewegen Sie den nichtRasierer.Es sammelt und mittelt das Rauschen des Gyroskops auf allen drei Achsen.
Sie sollten jetzt eine Ausgabe haben, die so aussieht:
Kreisel x,y,z (aktuell/Durchschnitt) = -29,00/-27,98 102,00/100,51 -5,00/-5,85- Wenn Sie der Meinung sind, dass Sie die Messung durch Schütteln oder Bewegen des Boards vermasselt haben, können Sie sie zurücksetzen, indem Sie #oc senden.
- Nehmen Sie die zweiten Werte jedes Paares und fügen Sie sie in Razor_AHRS.ino ein.
- Erledigt :)
Erweiterte Magnetometerkalibrierung
- Um mit der Kalibrierung zu beginnen, bringen Sie den Sensor in die magnetische Umgebung, in der er später verwendet wird - z. an der genauen Stelle auf Ihren Kopfhörern, wenn Sie Head-Tracking für Audioanwendungen benötigen (Kopfhörer haben starke Magnete, je weniger Sie den Sensor nach dem Kalibrieren bewegen, desto besser werden Ihre Ergebnisse; Sie sollten auch daran denken, etwas Dummy-Material anzubringen zwischen den Ohrmuscheln, um sie in normale Hörposition zu bringen).
- Beenden Sie alle Anwendungen, die vom Sensor lesen (z.Serieller Monitor,wird bearbeitetTestskizze, …) und führen Sie die auswird bearbeitetMagnetometer-Kalibrierungsskizze in Processing/Magnetometer_calibration. Tatsächlich müssen Sie zuerst die EJML-Bibliothek installieren, sonst wird der Sketch nicht ausgeführt. Wie geht das? Schauen Sie sich die anNOTIZoben in Magnetometer_calibration.pde.
Versuchen Sie, den Sensor so zu drehen, dass Sie alle Ausrichtungen abdecken, sodass Sie Punkte erzeugen, die die Kugel mehr oder weniger gleichmäßig abdecken.
In einer weitgehend unverzerrten Umgebung könnte das etwa so aussehen:

Drücken Sie die LEERTASTE und beobachten Sie diewird bearbeitet-Konsole - Sie finden einige Codezeilen, die Sie in die Firmware unter "USER SETUP AREA" / "SENSOR CALIBRATION" einfügen müssen, und Sie sind fertig.
Die gesammelten Daten (die Punkte) werden auch in eine Datei magnetom.float im Skizzenordner geschrieben. Falls Sie nun Matlab besitzen, finden Sie unter Matlab/magnetometer_calibration ein Skript namens magnetometer_calibration.m , das diese Datei verwendet und einige Diagramme für Sie erstellt, sodass Sie die Kalibrierung visuell überprüfen können.
Ellipsoidanpassung und korrigierte Werte:


Ein weiteres Kalibrierungsbeispiel: Weicheisen ergibt eine Kugel, die zu einem Ellipsoid skaliert und verzerrt ist.
Gesampelte Magnetometer-Rohwerte:

Ellipsoidanpassung und korrigierte Werte:






- Produktbewertung (29)
- Q & A
-
: Woher stammen die Elecbee-Produkte? Sind sie zertifiziert?2023-03-03
-
Antworten:
Elecbee hat langfristige Kooperationsvereinbarungen mit OEM-Fabriken in China. Dadurch können wir die Kosten für den Zwischenkanal reduzieren und Ihnen Geld sparen helfen. Alle unsere Produkte werden streng nach den relevanten globalen Standards hergestellt, um eine gute Kompatibilität und ausgezeichnete Qualität der Produkte zu gewährleisten.
2023-03-03
-
: Welche Zahlungsarten akzeptieren Sie?2023-03-03
-
Antworten:
Unsere Hauptzahlungsmethoden umfassen Paypal, Kreditkarten, Debitkarten, Überweisung und mehr zum Entdecken. Bitte wählen Sie die Zahlungsmethoden, die Ihnen am besten gefallen.
2023-03-03
-
: Wann werden Sie den Versand arrangieren?2023-03-03
-
Antworten:
Nach Bestätigung des Zahlungseingangs werden wir die Lieferung so schnell wie möglich arrangieren und die Sendungsnummer auf die Website hochladen, damit Sie sie verfolgen können.
2023-03-03
-
: Wie kann ich umtauschen oder zurückgeben?2023-03-03
-
Antworten:
1.Sie können innerhalb von 30 Tagen nach Erhalt der Ware eine Rückgabe beantragen. Stellen Sie bitte sicher, dass die äußere Verpackung intakt ist und das Produkt sich in seinem Originalzustand befindet. Wir werden Ihre Rückerstattung gemäß den geltenden Bestimmungen arrangieren, sobald das Paket bei uns eingetroffen ist.
2.Rückgabe-Prozess: Sie beantragen eine Rückgabe - Wir genehmigen die Rückgabe - Wir arrangieren die Rückgabe - Wir erhalten die Produkte und führen eine Inspektion durch - Wir arrangieren eine Rückerstattung.
3.Wir tragen die Frachtkosten für Rücksendungen, die durch uns verursacht wurden, beispielsweise aufgrund von Qualitätsproblemen. Für Rücksendungen, die vom Käufer verursacht wurden, ist der Käufer für die Versandkosten verantwortlich.
2023-03-03
Verwandte Produkte

MH-Z19B Upgrade-Version 0-5000 PPM Infrarot-CO2-Sensor für CO2-Raumluftqualitätsmonitor UART/PWM

5 stücke W1308H LED Mikrocomputer Digitalanzeige Temperaturregler Einstellbarer Thermostat Intelligente Zeitsteuerung 12 V
20 Stück APDS-9960 Gestensensormodul Digitaler RGB-Lichtsensor für Arduino