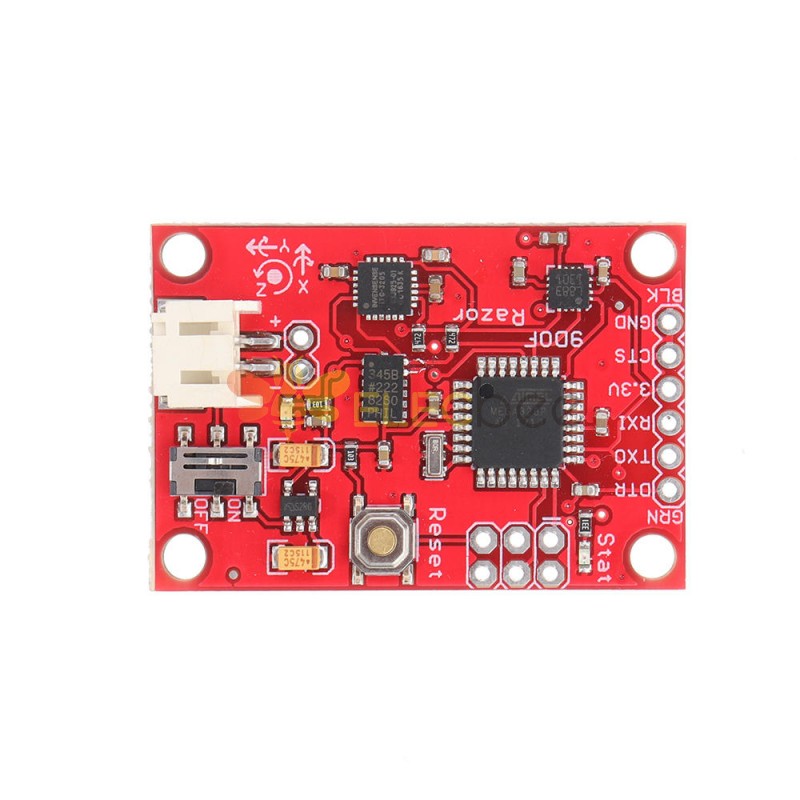
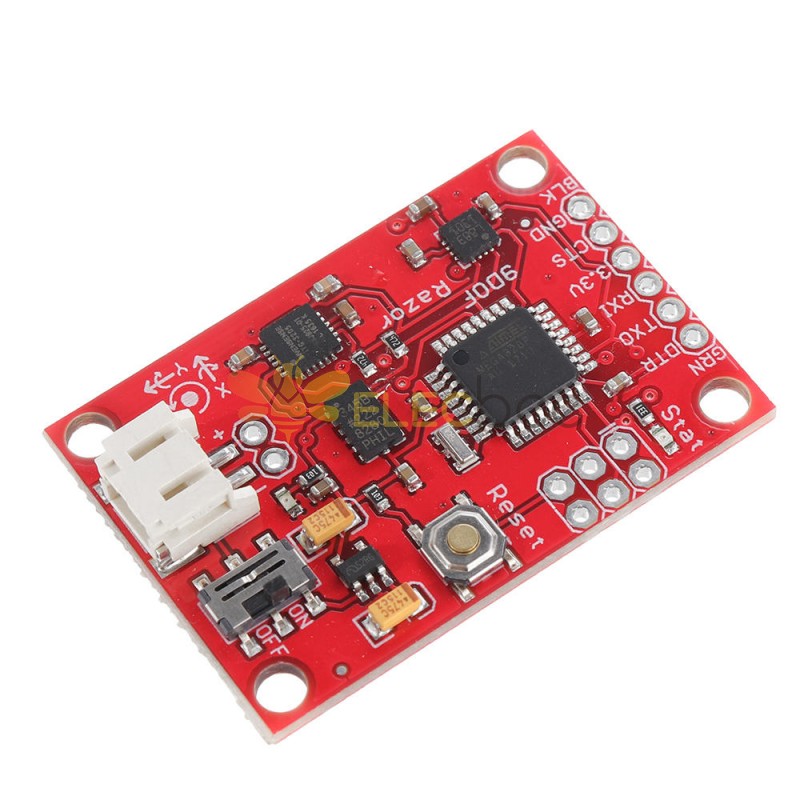
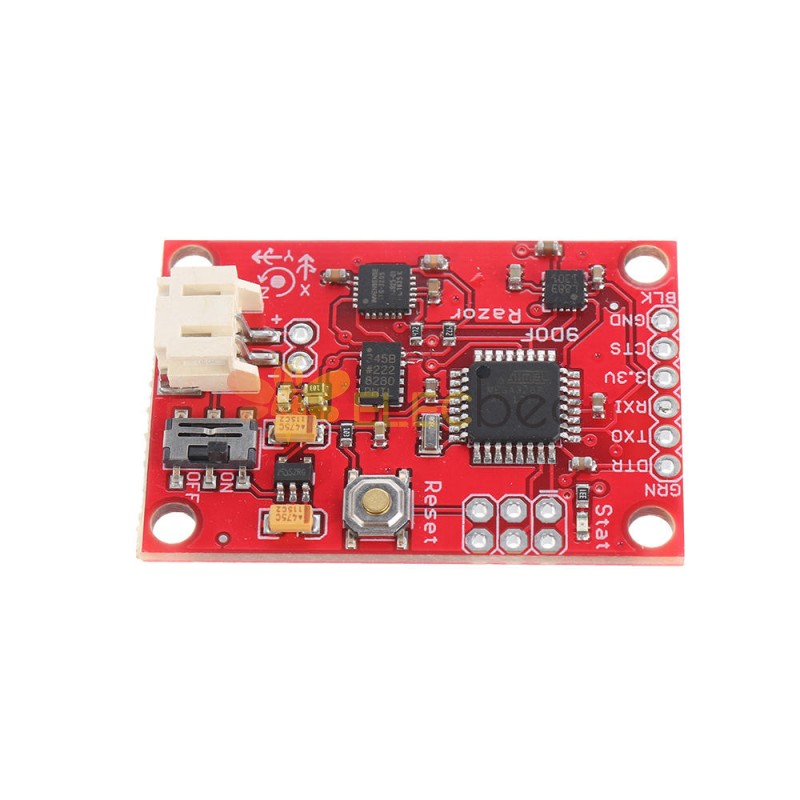
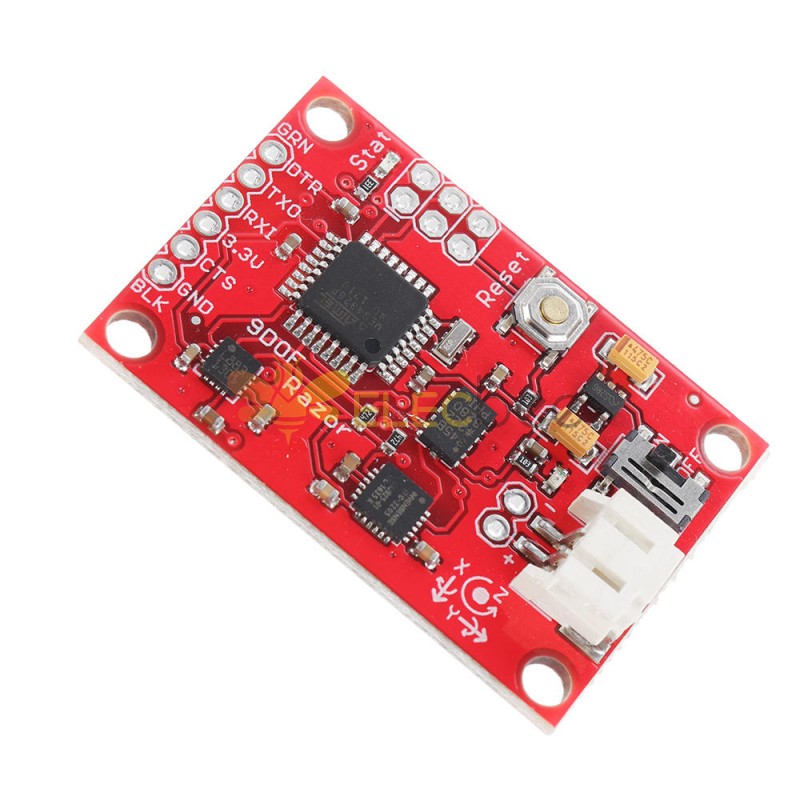
9 Axis Atmega328 Sensor Module IMU AHRS ITG3200 / ITG3205 Gyro ADXL345 Accelerometer HMC5883L Magnetometer 3-5V DC لـ Arduino - المنتجات التي تعمل مع لوحات Arduino الرسمية



- تفاصيل المنتج



المعايرة القياسية:
قد يكون من الجيد تشغيلموس الحلاقةقبل المعايرة ببضع دقائق ، بحيث يمكن لأجهزة الاستشعار أن تسخن. قد تكون معايرة المستشعرات في المرة الأولى صعبة بعض الشيء ، ولكن لنبدأ:
- فتح لـ /Razor_AHRS/Razor_AHRS.ino باستخدام لـ والعثور على قسم "منطقة إعداد المستخدم" / "معايرة المستشعر". هذا هو المكان الذي تضع فيه قيم المعايرة لاحقًا.
- ربطAHRS شفراتعلى جهاز الكمبيوتر الخاص بك ، قم بتعيين المنفذ التسلسلي الصحيح لـ وافتح ملفجهاز المراقبة التسلسلي.
إذا لم تكن قد قمت بتغيير الإعدادات الافتراضية للبرامج الثابتة ، فمن المفترض أن ترى الكثير من المخرجات مثل هذا:
# YPR = -155.73 ، -76.48 ، -129.51اضبط البرنامج الثابتوضع الإخراجلمعايرةعن طريق إرسال السلسلة #oc. يجب أن تشاهد الآن الإخراج مثل هذا:
تسريع x ، y ، z (min / max) = -5.00 / -1.00 25.00 / 29.00 225.00 / 232.00
- معايرة مقياس التسارع:
- سنحاول إيجاد القيم المصغرة وقيم الإخراج القصوى لجاذبية الأرض على كل محور.عندما تقوم بتحريك اللوحة ، حركها ببطء حقيقي ، وبالتالي فإن التسارع الذي تطبقه عليها يكون صغيرًا قدر الإمكان.نحن نريد فقط قوة نقية!
- خذ اللوحة وأشر مباشرة لأسفل باستخدام المحور السيني (تذكر: المحور السيني = باتجاه الحافة القصيرة مع فتحات الموصل). أثناء القيام بذلك ، يمكنك رؤية x-max (القيمة الثانية) تزداد.
- أمسك اللوحة ثابتة للغاية وأعد ضبط القياس عن طريق إرسال #oc مرة أخرى.
- الآن قم بإمالة اللوحة قليلاً في كل اتجاه حتى لا تكبر القيمة أكثر واكتب قيمة x-max.
- افعل نفس الشيء مع الجانب الآخر (يشير المحور x لأعلى) للحصول على x-mini mum: أدخل الموضع ، أرسل #oc لإعادة القياس ، ابحث عن قيمة x-mini mum وقم بتدوينها.
- افعل نفس الشيء للمحور ع (لأسفل ولأعلى) والمحور ص (لليمين واليسار).
- إذا كنت تعتقد أنك أخطأت في القياس عن طريق هز اللوحة أو تحريكها بسرعة كبيرة ، فيمكنك دائمًا إعادة الضبط بإرسال #oc.
- يجب أن يكون لديك الآن جميع قيم min / max. ضعهم في Razor_AHRS.ino.
- ملحوظة: عليك أن تكون حذرًا جدًا عند القيام بذلك! حتى النقر قليلاً على اللوحة بالإصبع يفسد القياس (جربه!) ويؤدي إلى معايرة خاطئة. استخدم #oc كثيرًا وتحقق مرتين من الحد الأدنى / الحد الأقصى للقيم)
معايرة مقياس المغناطيسية:
- هذه المرة يمكنك هز السبورة بقدر ما تريد ، لكن يمكنك إبعادها عن التشوهات المغناطيسية التي تحدثها أجهزة الكمبيوتر والأجهزة الإلكترونية الأخرى والأشياء المعدنية.
- نحن ما زلناوضع المعايرةلمقياس التسارع. أرسل on ، والذي سينقل المعايرة إلىالتاليالمستشعر ، وهو مقياس المغناطيسية.
- ملحوظة:يظل هذا القسم هنا كمرجع ، ولكن يجب عليك استخدام "معايرة مقياس المغناطيسية الموسعة الأحدث (انظرالقسم التالي) لأنه يعطي نتائج أفضل بكثير! يمكنك التزلج p هذا والاستمرار مع الجيروسكوب.
- سنحاول العثور على الأم الصغيرة وقيم الإخراج القصوى للمجال المغناطيسي الأرضي على كل محور. يعمل هذا بشكل أساسي مثل معايرة مقياس التسارع ، باستثناء أن المجال المغناطيسي للأرض لا يشير إلى أسفل بشكل مستقيم. اعتمادًا على مكان وجودك حاليًا على الكوكب ، فإنه يشير إلى الشمال والأعلى (نصف الكرة الجنوبي) أو الشمال والأسفل (نصف الكرة الشمالي) بزاوية معينة. هذه الزاوية تسمىميل. بالإضافة إلى ذلك ، قد يكون هناك انحراف بسيط عن الرسم الجغرافي الحقيقي للشمال ، وهو ما يسمىالانحراف. يرىويكيبيديا. يفترض الوصف التالي أنك تقوم بمعايرة مقياس المغناطيسية في نصف الكرة الشمالي.
- أمسك اللوحة بشكل مسطح مثل البوصلة مع المحور السيني (تذكر: المحور السيني = للأمام ، باتجاه فتحات الموصل) يشير إلى الشمال. ثم ابدأ بتدوير اللوحة حول المحور الشرقي الغربي بحيث تبدأ في الإشارة لأسفل. لاحظ x-max (القيمة الثانية) فيجهاز المراقبة التسلسليوستلاحظ عندما تقوم بمحاذاة المحور x للوحة مع المجال المغناطيسي للأرض. توقف عن الدوران هناك ثم قم بالإمالة مرة أخرى قليلاً في كل اتجاه حتى لا تكبر القيمة بعد الآن.
- افعل نفس الشيء مع الجانب الآخر للحصول على x-mini mum: أشر أولاً إلى الشمال ، ثم إلى الأسفل.
- بالنسبة لمقياس المغناطيسية ، لا نحتاج إلى إعادة التعيين باستخدام #oc بين القياسات.
- افعل نفس الشيء مع المحور z (أعلى / أسفل) والمحور y (يسار / يمين).
- ملاحظة: دوران اللوحةحوللا يهم المحور الذي تريد قياسه ، فقط أنه يشير إلى الاتجاه الصحيح. على سبيل المثال ، عندما تبدأ في قياس المحور ع ، لا يهم إذا كان المحور س يشير لأعلى أو لأسفل أو لليسار أو لليمين.
يجب أن يكون لديك الآن شيء مثل هذا في الخاص بكجهاز المراقبة التسلسلي:
magn x، y، z (min / max) = -564.00 / 656.00 -585.00 / 635.00 -550.00 / 564.00ضع هذه القيم في Razor_AHRS.ino.
معايرة الجيروسكوب:
- وضعموس الحلاقةلا يزال على الطاولة.
- نحن ما زلناوضع المعايرةلمقياس المغناطيسية. أرسل on ، والذي سينقل المعايرة إلىالتاليجهاز الاستشعار ، وهو الجيروسكوب.
- انتظر لمدة 10 ثوانٍ ، ولا تحركموس الحلاقة.سيقوم بجمع ومتوسط ضوضاء الجيروسكوب على المحاور الثلاثة.
يجب أن يكون لديك الآن إخراج يشبه هذا:
الدوران x ، y ، z (الحالي / المتوسط) = -29.00 / -27.98 102.00 / 100.51 -5.00 / -5.85- إذا كنت تعتقد أنك أخطأت في القياس عن طريق هز اللوحة أو تحريكها ، فيمكنك إعادة الضبط بإرسال #oc.
- خذ القيم الثانية لكل زوج وضعها في Razor_AHRS.ino.
- منتهي :)
معايرة مقياس المغناطيسية الممتدة
- لبدء المعايرة ، ضع المستشعر في البيئة المغناطيسية حيث سيتم استخدامه لاحقًا - على سبيل المثال في المكان المحدد على سماعات الرأس ، إذا كنت بحاجة إلى تتبع الرأس لتطبيقات الصوت (تحتوي سماعات الرأس على مغناطيس قوي ، فكلما قل تحريك المستشعر بعد المعايرة ، كانت نتائجك أفضل ؛ يجب أن تفكر أيضًا في وضع بعض المواد الوهمية بين أكواب الأذن لجعلها في وضع السمع الطبيعي).
- قم بإنهاء جميع التطبيقات التي تقرأ من المستشعر (على سبيل المثال.جهاز المراقبة التسلسليويعالجاختبار الرسم ، ...) وتشغيليعالجرسم معايرة مقياس المغناطيسية الموجود في المعالجة / مقياس المغنطيسية_المعايرة. في الواقع ، عليك تثبيت مكتبة EJML أولاً ، وإلا فلن يعمل الرسم التخطيطي. كيف يتم فعل ذلك؟ الق نظرة علىملحوظةفي الجزء العلوي من Magnetometer_calibration.pde.
حاول تدوير المستشعر بطريقة بحيث تغطي جميع الاتجاهات بحيث تنتج نقاطًا تغطي الكرة بشكل متساوٍ أو أكثر.
في بيئة غير مشوهة في الغالب ، قد يبدو هذا شيئًا كالتالي:

اضغط على SPACE وشاهد ملفيعالجوحدة التحكم - ستجد بعض أسطر التعليمات البرمجية التي يجب عليك وضعها في البرنامج الثابت ضمن "منطقة إعداد المستخدم" / "قياس المستشعر" وبذلك تكون قد انتهيت.
تتم كتابة البيانات المجمعة (النقاط) أيضًا في ملف magnetom.float في مجلد الرسم. الآن في حال كنت تملك Matlab ، ستجد ضمن Matlab / magnetometer_calibration برنامج نصي يسمى magnetometer_calibration.m يستخدم هذا الملف وينتج بعض المخططات لك ، حتى تتمكن من التحقق بصريًا من المعايرة.
تناسب Ellipsoid والقيم المصححة:


مثال آخر للمعايرة: يعطي الحديد اللين كرة متدرجة ومشوهة إلى شكل بيضاوي.
عينات قيم المغناطيسية الخام:

تناسب Ellipsoid والقيم المصححة:






- مراجعة المنتج
- سؤال وجواب
-
: من أين تأتي منتجات إليكبي؟ هل هي معتمدة؟2023-03-03
-
إجابة:
إليكبي لديها اتفاقيات تعاون طويلة الأجل مع مصانع OEM في الصين. وبذلك نحن قادرون على تقليل تكلفة القناة الوسيطة ومساعدتك في توفير المال. جميع منتجاتنا مصنوعة بدقة وفقًا للمعايير العالمية ذات الصلة، لضمان توافق جيد وجودة ممتازة للمنتجات.
2023-03-03
-
: ما هي أشكال الدفع التي تقبلونها؟2023-03-03
-
إجابة:
تشمل أساليب الدفع الرئيسية لدينا باي بال وبطاقات الائتمان وبطاقات الخصم والتحويل البنكي والمزيد لاكتشافه. يرجى اختيار أساليب الدفع التي تناسبك.
2023-03-03
-
: متى ستقومون بترتيب الشحن؟2023-03-03
-
إجابة:
بعد تأكيد استلام دفعتكم، سنقوم بترتيب التسليم في أقرب وقت ممكن ورفع رقم الشحن على الموقع الإلكتروني لتتمكنوا من تتبعه.
2023-03-03
-
: كيفية الاستبدال أو الاسترجاع؟2023-03-03
-
إجابة:
1.يمكنك التقدم بطلب للاسترجاع في غضون 30 يومًا بعد استلام البضائع. يرجى التأكد من سلامة العبوة الخارجية وأن المنتج في حالته الأصلية. سنقوم بترتيب استردادك وفقًا للأحكام المعمول بها بمجرد استلام الحزمة.
2.عملية الاسترجاع: تقديم طلب استرداد - الموافقة على الاسترجاع - ترتيب الاسترجاع - استلام المنتجات والفحص - نقوم بترتيب الاسترداد.
3.سنتحمل رسوم الشحن للمرتجعات التي تسببها لنا ، على سبيل المثال في حالة وجود مشكلة في الجودة. بالنسبة للمرتجعات التي تسببها المشتري ، يجب على المشتري أن يتحمل رسوم الشحن.
2023-03-03
منتجات ذات صلة

MH-Z19B نسخة مطورة 0-5000PPM مستشعر ثاني أكسيد الكربون بالأشعة تحت الحمراء لجهاز مراقبة جودة الهواء الداخلي CO2 UART / PWM

5 قطعة W1308H LED الحواسيب الصغيرة الرقمية العرض متحكم في درجة الحرارة قابل للتعديل ترموستات ذكي تحكم الوقت 12 فولت
20 قطعة APDS-9960 Gesture Sensor Module Digital RGB Light Sensor for Arduino