
Ürünleri ara...

Güçlendirmek iyi olabilirUsturaKalibrasyondan birkaç dakika önce, böylece sensörler ısınabilir. Sensörleri ilk kez kalibre etmek biraz zor olabilir, ama başlayalım:
Ürün yazılımı varsayılanlarını değiştirmediyseniz, bunun gibi çok sayıda çıktı görmelisiniz:
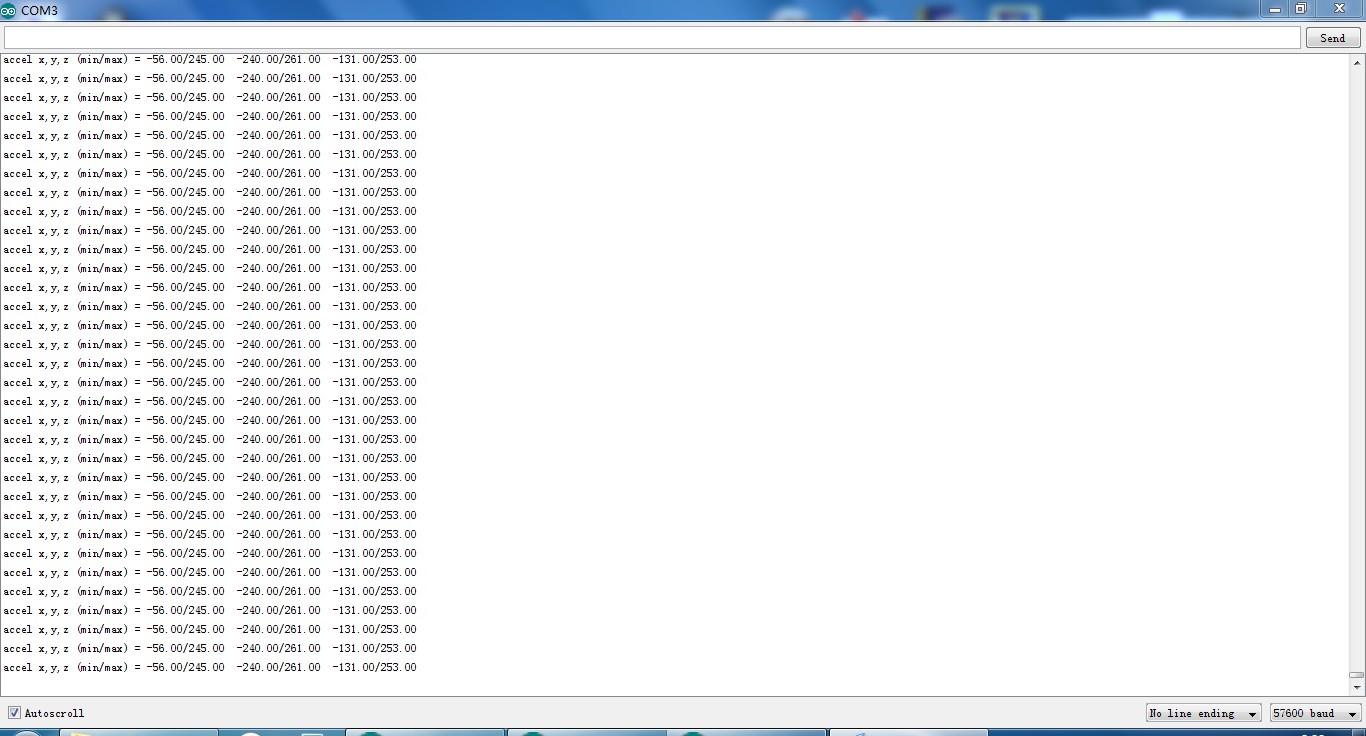
#YPR=-155.73,-76.48,-129.51Üretici yazılımını ayarlayınçıkış moduilekalibrasyon#oc dizesini göndererek. Şimdi şöyle bir çıktı görmelisiniz:
hızlanma x,y,z (min/maks) = -5,00/-1,00 25,00/29,00 225,00/232,00Manyetometreyi kalibre etme:
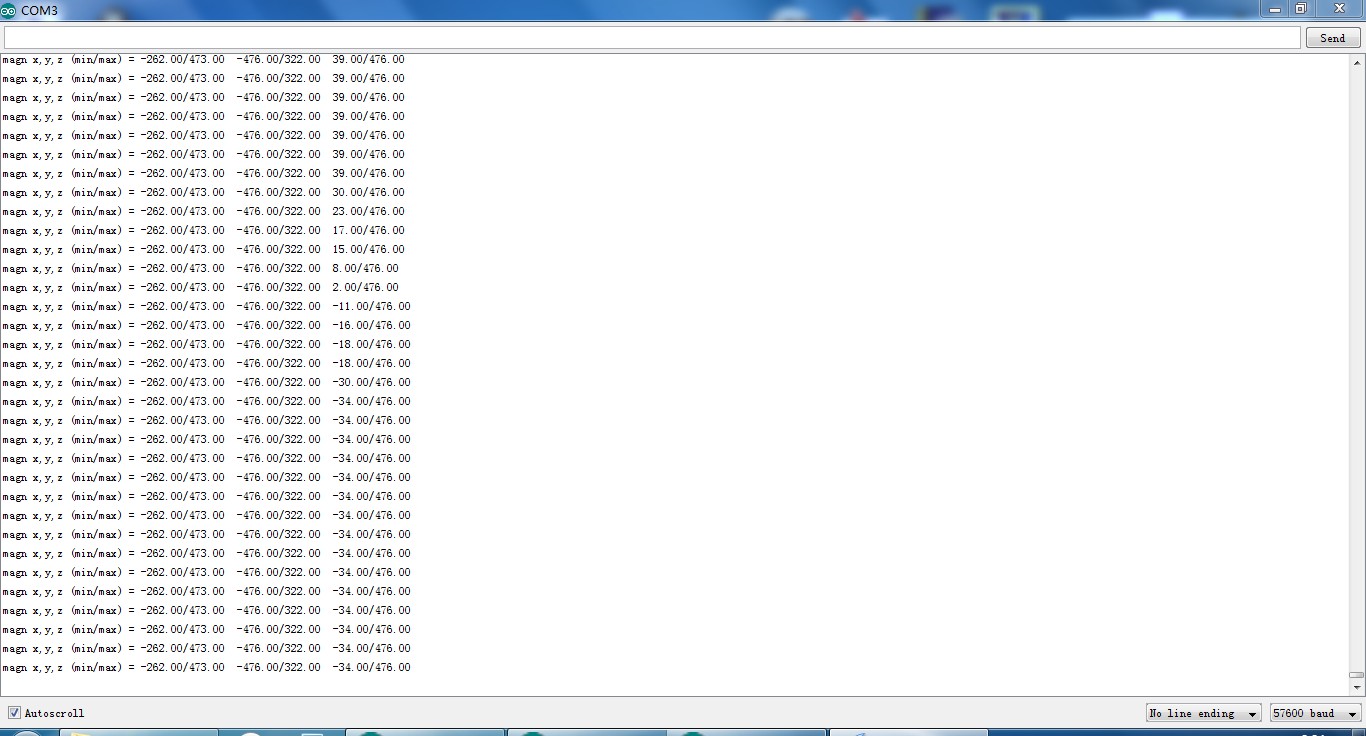
Artık cebinizde böyle bir şeye sahip olmalısınız.Seri Monitör:
büyütme x,y,z (min/maks) = -564,00/656,00 -585,00/635,00 -550,00/564,00Bu değerleri Razor_AHRS.ino'ya yerleştirin.
Jiroskopu kalibre etme:
Artık şuna benzeyen bir çıktıya sahip olmalısınız:
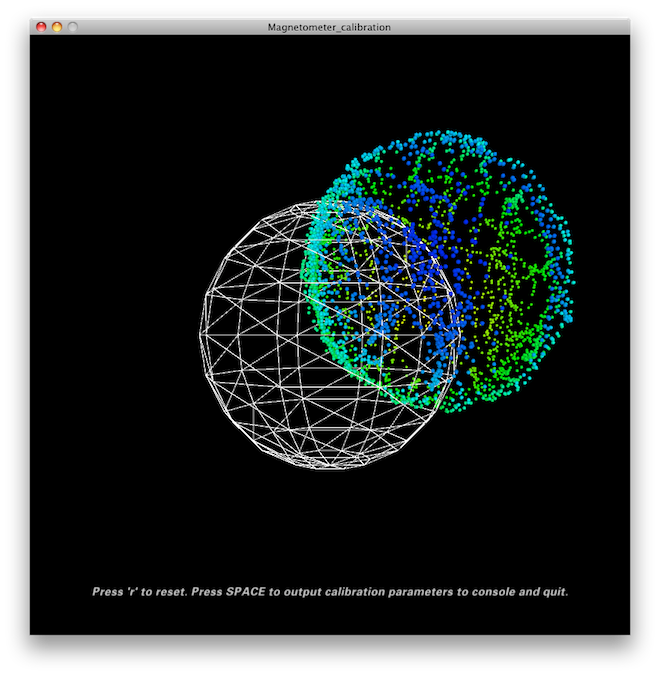
cayro x,y,z (akım/ortalama) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Sensörü, küreyi aşağı yukarı eşit şekilde kaplayan noktalar oluşturacak şekilde tüm yönleri kapsayacak şekilde döndürmeye çalışın.
Çoğunlukla bozulmamış bir ortamda bu şöyle görünebilir:
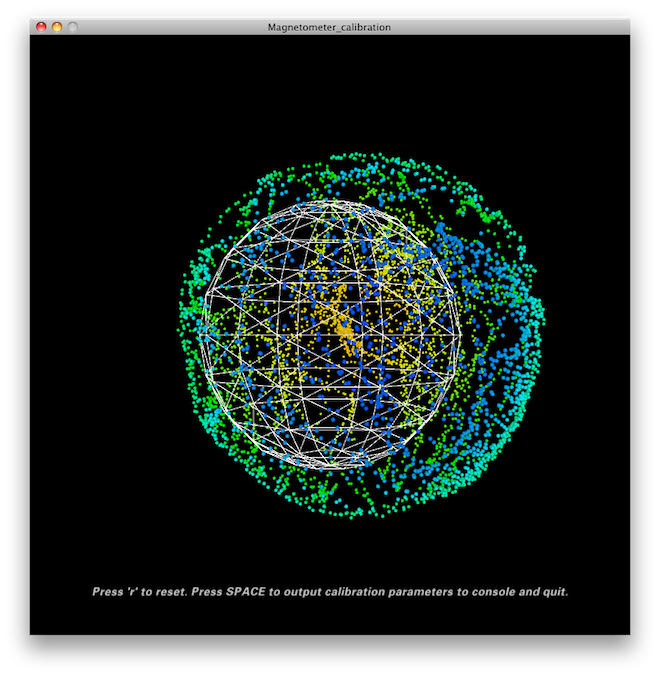
BOŞLUK'a basın ve videoyu izleyinİşlemekonsol - "KULLANICI KURULUM ALANI" / "SENSÖR KALİBRASYONU" altında ürün yazılımına girmeniz gereken bazı kod satırları bulacaksınız ve bitirdiniz.
Toplanan veriler (noktalar) ayrıca çizim klasöründeki bir magnetom.float dosyasına yazılır. Matlab'a sahip olmanız durumunda, Matlab/magnetometer_calibration altında bu dosyayı kullanan ve sizin için bazı grafikler üreten magnetometer_calibration.m adlı bir komut dosyası bulacaksınız, böylece kalibrasyonu görsel olarak kontrol edebilirsiniz.
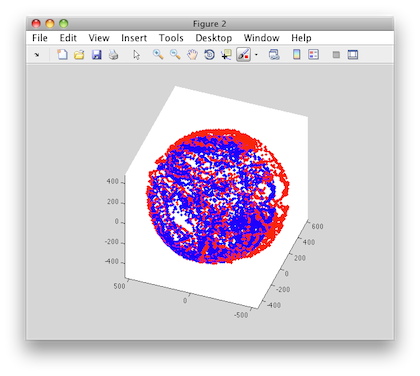
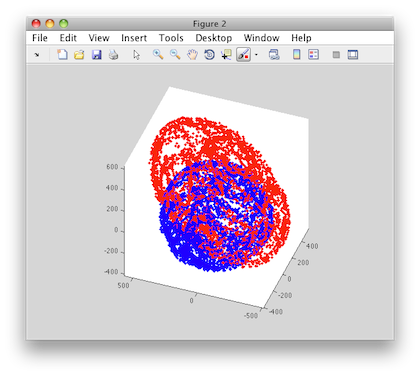
Elipsoid uyum ve düzeltilmiş değerler:
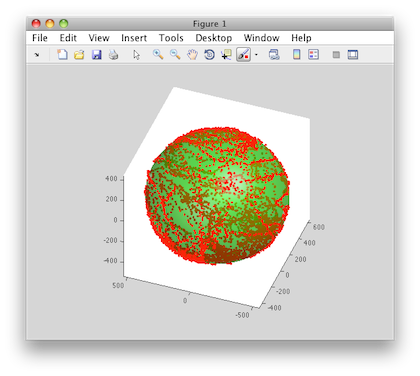
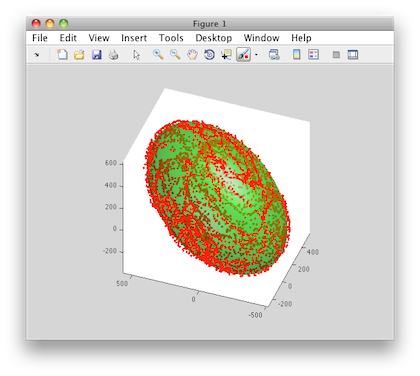
Örneklenmiş ham manyetometre değerleri:
Elipsoid uyum ve düzeltilmiş değerler:
Kargo | Teslimat Süresi | Stokta olan parçalar için siparişlerin 3 gün içinde gönderilmesi beklenmektedir. Elecbee, Pazar günleri hariç günde bir kez saat 17:00 civarında siparişleri gönderir. Gönderildikten sonra tahmini teslimat süresi seçtiğiniz taşıyıcıya bağlıdır. DHL Express: 3-7 iş günü DHLeCommerce: 12-22 iş günü FedEx International Priority: 3-7 iş günü EMS: 10-15 iş günü Kayıtlı Hava Postası: 15-30 iş günü | |
| Kargo Ücretleri | Siparişiniz için kargo ücretlerini alışveriş sepetinde bulabilirsiniz. | ||
| Kargo Seçenekleri | Siparişiniz için kargo ücretlerini alışveriş sepetinde bulabilirsiniz. | ||
| Kargo Takibi | Sipariş gönderildiğinde e-posta ile takip numarası göndereceğiz. 'Siparişimi Takip Et' özelliğini kullanarak siparişinizi takip edebilirsiniz. | ||
| İade/Garanti | İade | İadeler genellikle sevkiyat tarihinden itibaren 30 gün içinde tamamlanır. Lütfen iade onayı için müşteri hizmetleri ile iletişime geçin. Parçalar kullanılmamış ve orijinal ambalajında olmalıdır. Müşteri kargo ücretini karşılamalıdır | |
| Garanti | Tüm Elecbee alımları 30 günlük para iadesi iade politikası ve 1 yıllık Elecbee üretim arızalarına karşı garanti ile birlikte gelir. | ||
| Bu garanti, müşterinin yanlış montajı, talimatları takip etmemesi, ürün değişikliği, ihmal veya yanlış kullanım nedeniyle oluşan arızalara uygulanmaz. | |||
| Sipariş Verme | Nasıl Satın Alınır | Elecbee online sipariş kabul eder. | |
| Sepete Ekle > Ödeme > Siparişi Tamamla > Ödemeyi Bitir > Teslimat | |||
| Ödeme | PayPal, Kredi Kartı (Visa, Master, American Express), Banka Havalesi. | ||
