
Поиск товаров...
 Вход
Вход$USD
 0Вход0
0Вход0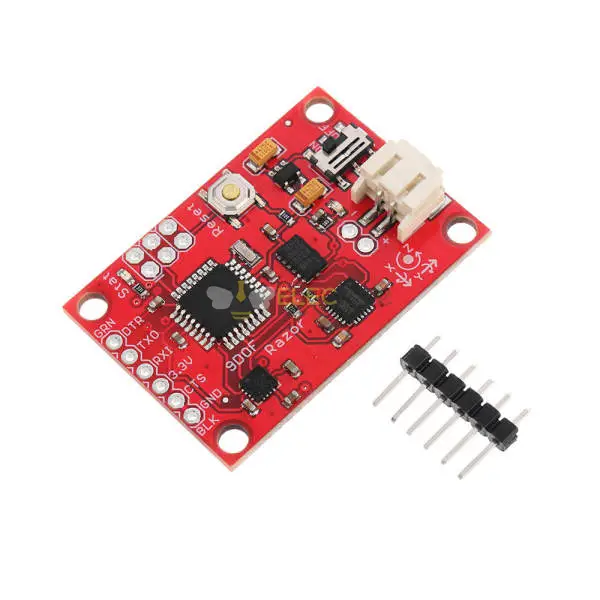

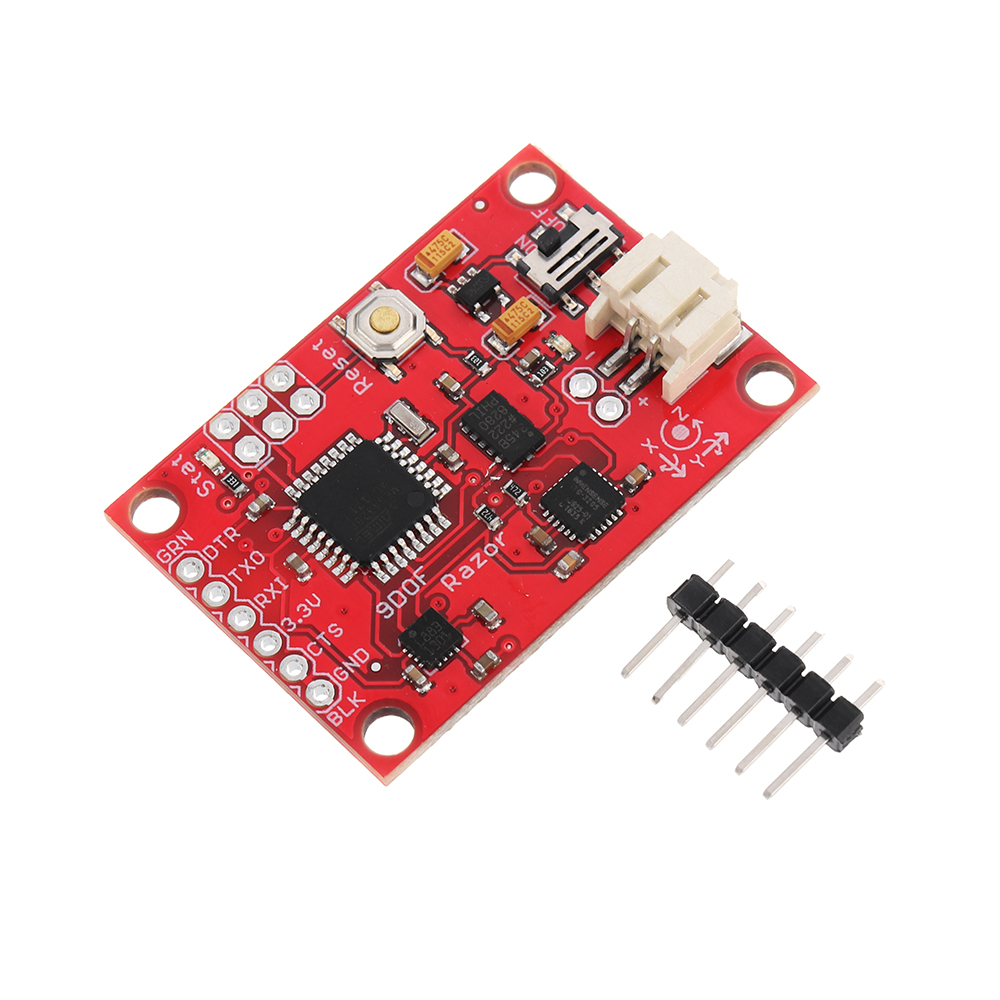
Возможно, было бы неплохо включитьБритваза несколько минут до калибровки, чтобы датчики могли прогреться. Калибровка датчиков в первый раз может быть немного сложной, но поехали:
Если вы не меняли настройки прошивки по умолчанию, вы должны увидеть множество выводов, подобных этому:
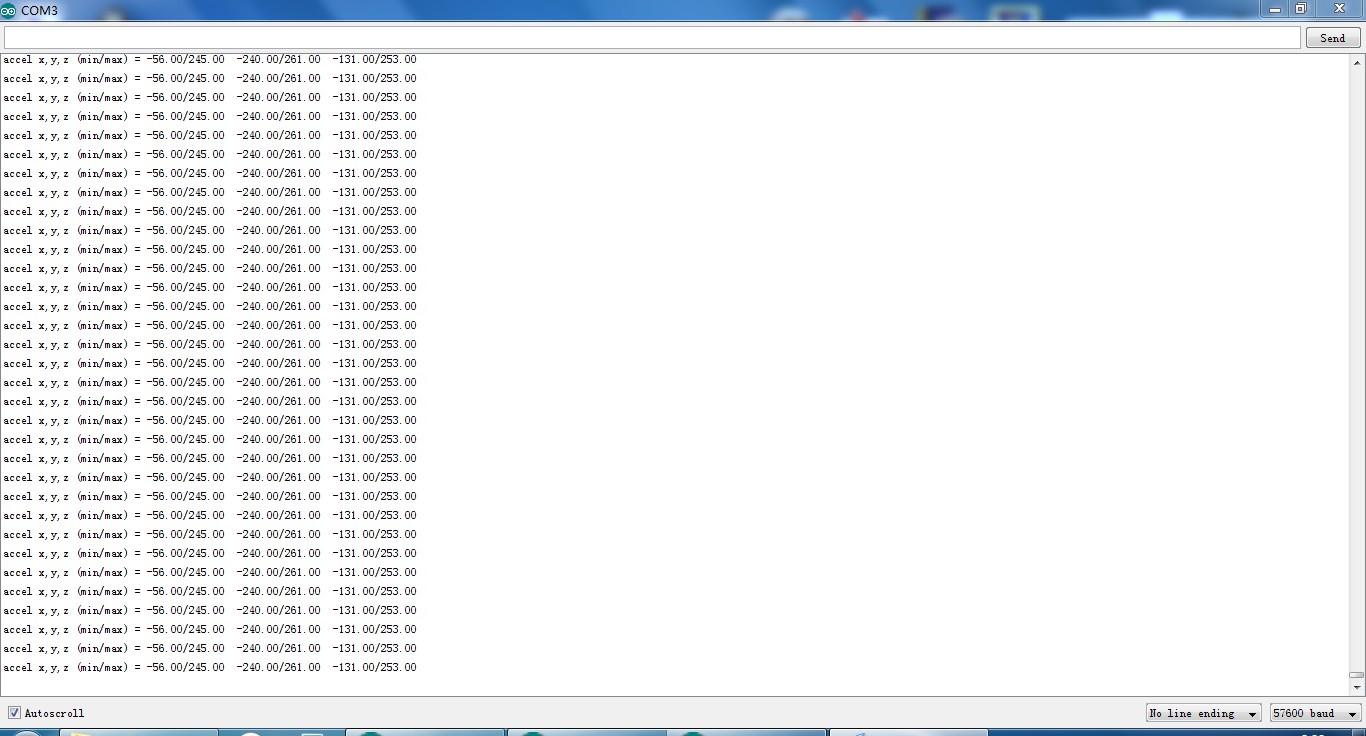
#YPR=-155,73,-76,48,-129,51Установить прошивкурежим выводаккалибровкаотправив строку #oc. Теперь вы должны увидеть такой вывод:
ускорение x,y,z (мин/макс) = -5,00/-1,00 25,00/29,00 225,00/232,00Калибровка магнитометра:
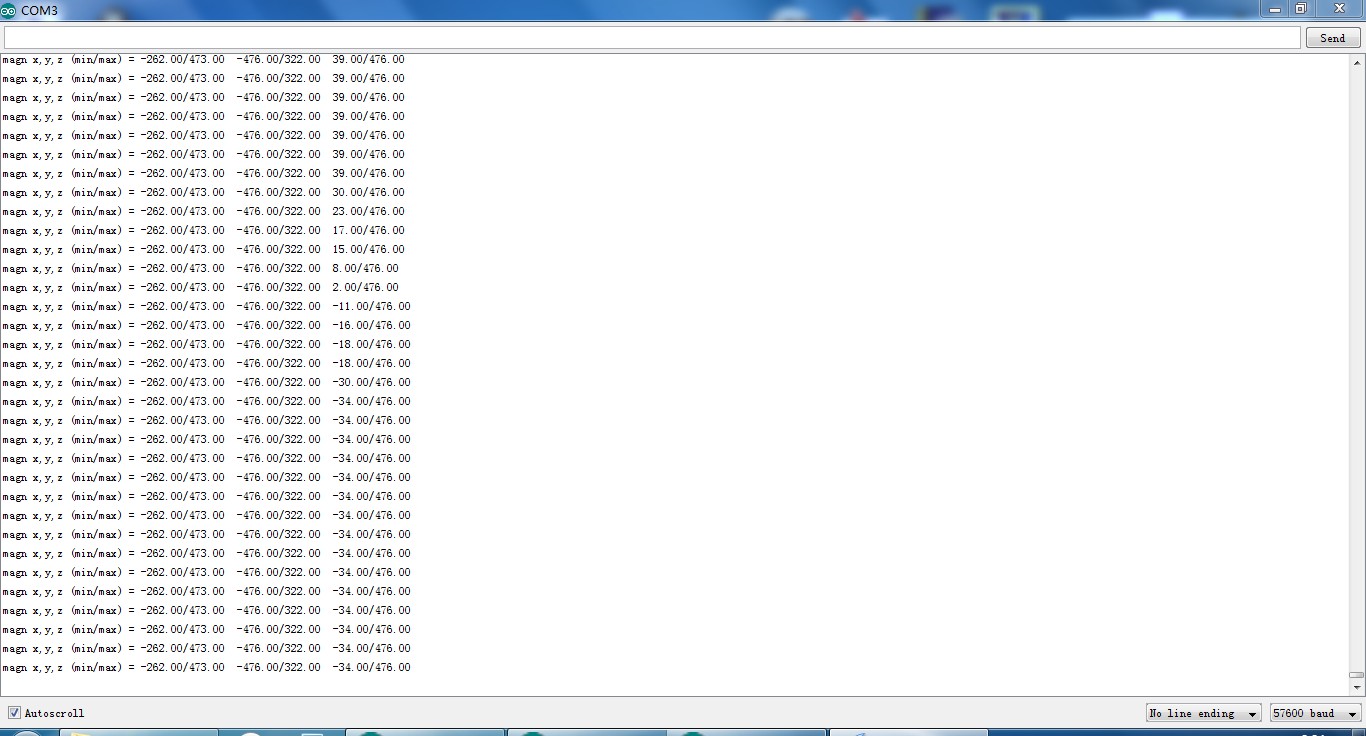
Теперь у вас должно быть что-то подобное в вашемСерийный монитор:
магнит x,y,z (мин/макс) = -564,00/656,00 -585,00/635,00 -550,00/564,00Поместите эти значения в Razor_AHRS.ino.
Калибровка гироскопа:
Теперь у вас должен быть вывод, который выглядит следующим образом:
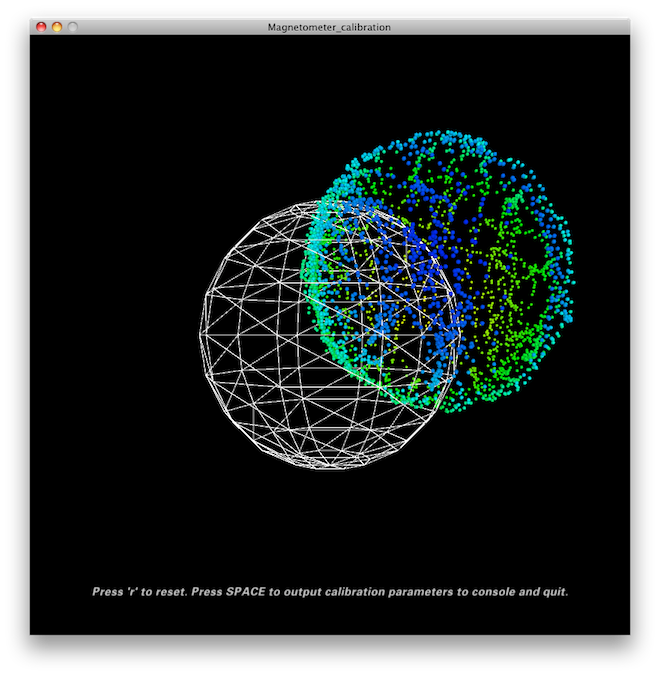
гироскоп x,y,z (текущий/средний) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Попробуйте повернуть датчик таким образом, чтобы он охватывал все ориентации и производил точки, более или менее равномерно покрывающие сферу.
В основном неискаженном окружении это может выглядеть примерно так:
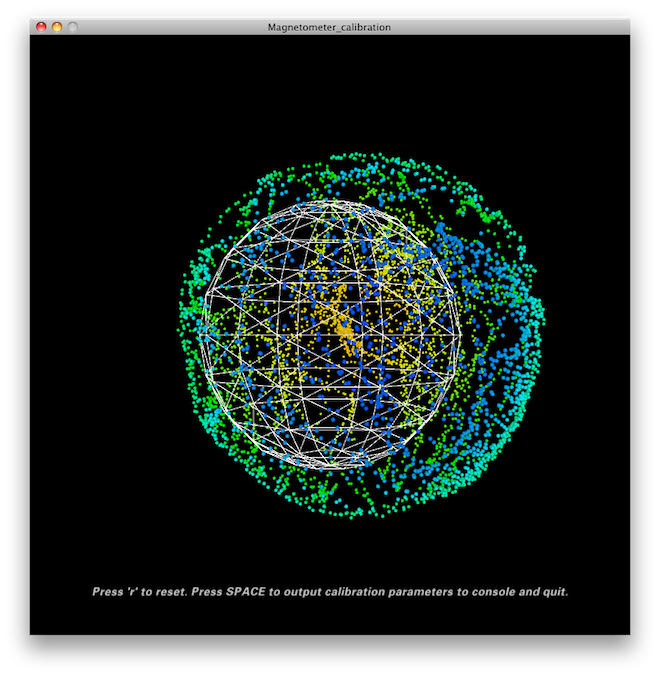
Нажмите ПРОБЕЛ и смотритеОбработкаконсоль — вы найдете несколько строк кода, которые нужно поместить в прошивку в разделе «ОБЛАСТЬ НАСТРОЙКИ ПОЛЬЗОВАТЕЛЯ» / «КАЛИБРОВКА ДАТЧИКА», и все готово.
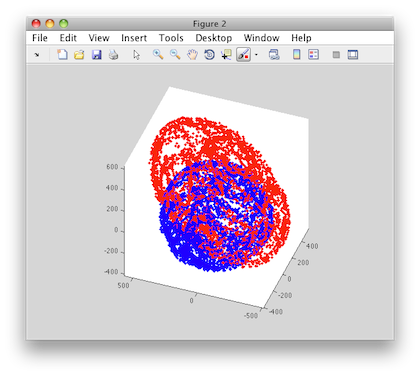
Собранные данные (точки) также записываются в файл magnetom.float в папке скетча. Теперь, если вы являетесь владельцем Matlab, в разделе Matlab/magnetometer_dication вы найдете скрипт с именем Magnetometer_Calibration.m, который использует этот файл и создает для вас несколько графиков, чтобы вы могли визуально проверить калибровку.
Подгонка эллипсоида и исправленные значения:
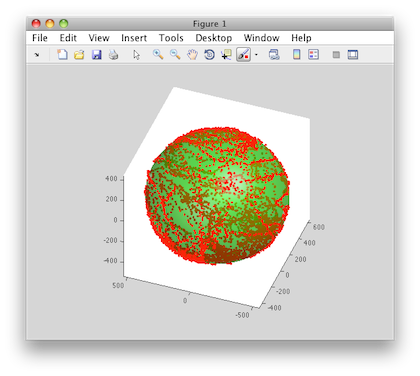
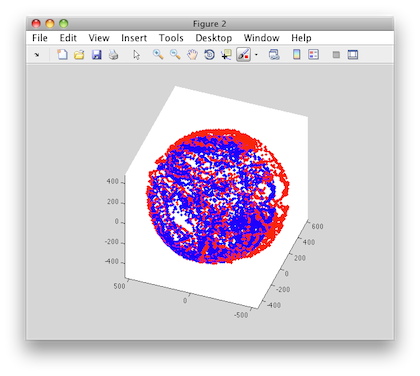
Примеры необработанных значений магнитометра:
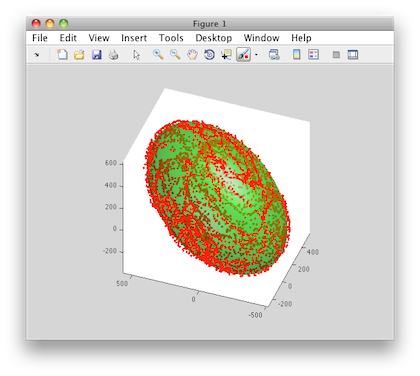
Подгонка эллипсоида и исправленные значения:
Доставка | Срок доставки | Для товаров в наличии заказы, как правило, отправляются в течение 3 дней. Elecbee отправляет заказы раз в день около 17:00, кроме воскресенья. После отправки срок доставки зависит от выбранного вами перевозчика ниже. DHL Express: 3-7 рабочих дней DHLeCommerce: 12-22 рабочих дней FedEx International Priority: 3-7 рабочих дней EMS: 10-15 рабочих дней Зарегистрированная авиапочта: 15-30 рабочих дней | |
| Тарифы на доставку | Тарифы на доставку вашего заказа можно найти в корзине. | ||
| Варианты доставки | Тарифы на доставку вашего заказа можно найти в корзине. | ||
| Отслеживание доставки | Мы уведомим вас по электронной почте с номером отслеживания после отправки заказа. Вы можете отслеживать заказ с помощью функции «Отследить мой заказ». | ||
| Возврат/Гарантия | Возврат | Возвраты обычно принимаются, если завершены в течение 30 дней с даты отправки. Для получения разрешения на возврат свяжитесь со службой поддержки клиентов. Детали должны быть неиспользованными и в оригинальной упаковке. Клиент несет расходы на доставку | |
| Гарантия | Все покупки в Elecbee поставляются с 30-дневной политикой возврата денег плюс 1-летняя гарантия Elecbee от производственных дефектов. | ||
| Эта гарантия не распространяется на изделия, дефекты которых вызваны неправильной сборкой клиентом, несоблюдением инструкций клиентом, модификацией продукта, халатной или неправильной эксплуатацией | |||
| Заказ | Как купить | Elecbee принимает онлайн-заказы. | |
| Добавить в корзину > Оформить заказ > Подать заказ > Завершить оплату > Доставка | |||
| Оплата | PayPal, Кредитная карта (Visa, MasterCard, American Express), Банковский перевод. | ||
