
Pesquisar por produtos...

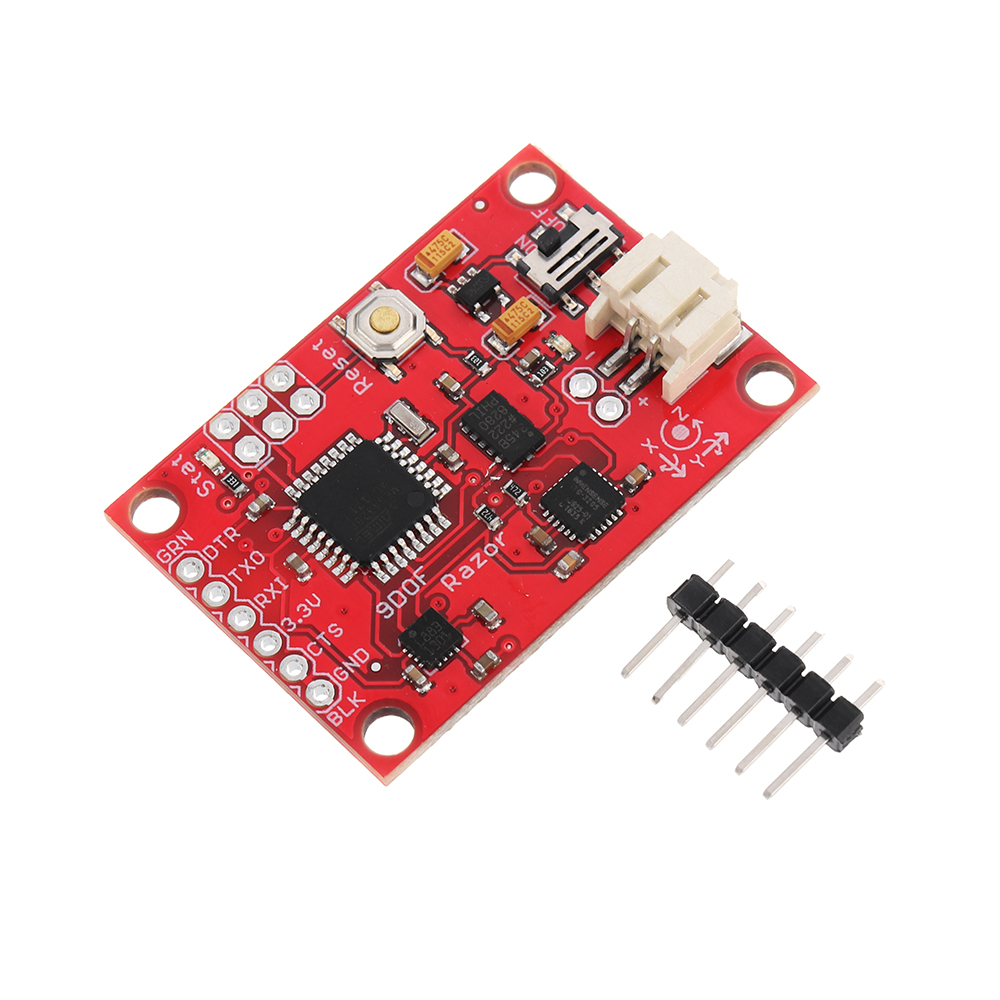
Pode ser bom ligar oNavalhaalguns minutos antes da calibração, para que os sensores possam aquecer. Calibrar os sensores na primeira vez pode ser um pouco complicado, mas vamos lá:
Se você não alterou os padrões do firmware, deverá ver muitos resultados como este:
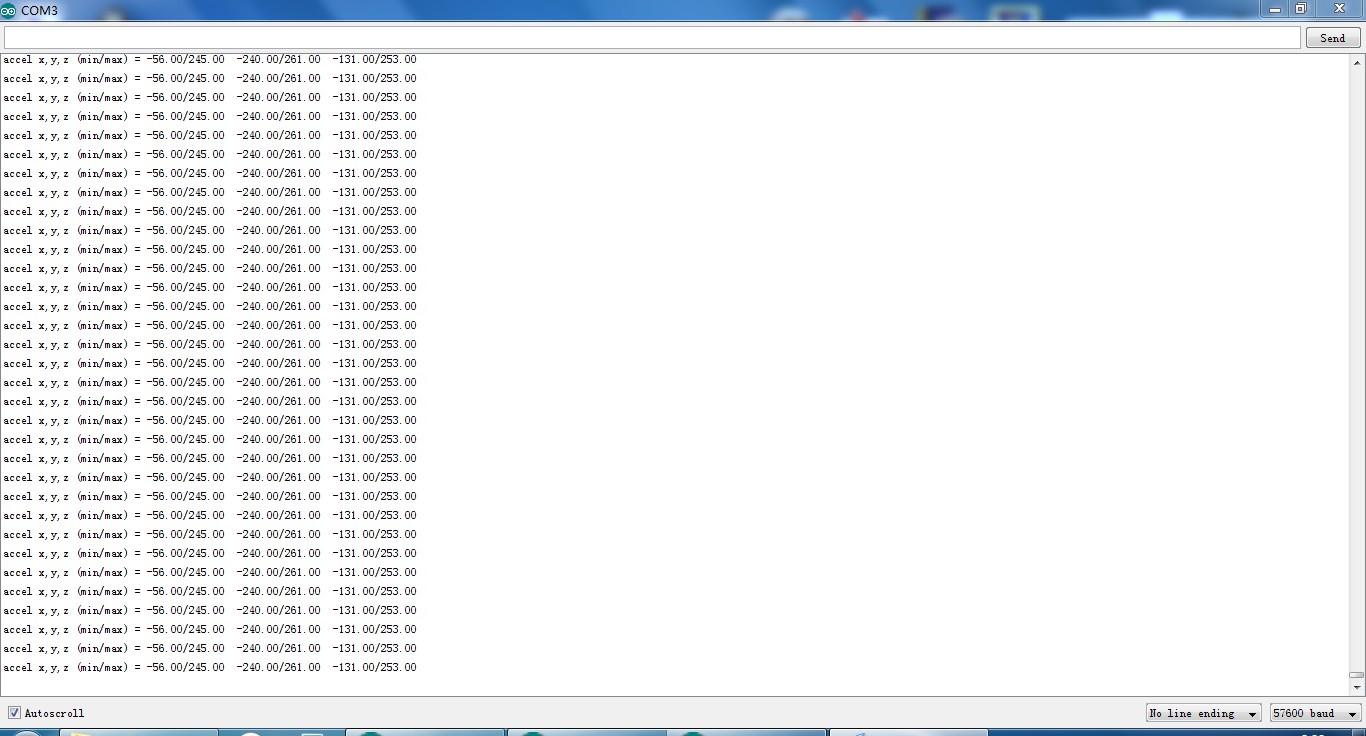
#YPR=-155,73,-76,48,-129,51Definir o firmwaremodo de saídaparacalibraçãoenviando a string #oc. Agora você deve ver uma saída como esta:
acel x,y,z (min/max) = -5,00/-1,00 25,00/29,00 225,00/232,00Calibrando o magnetômetro:
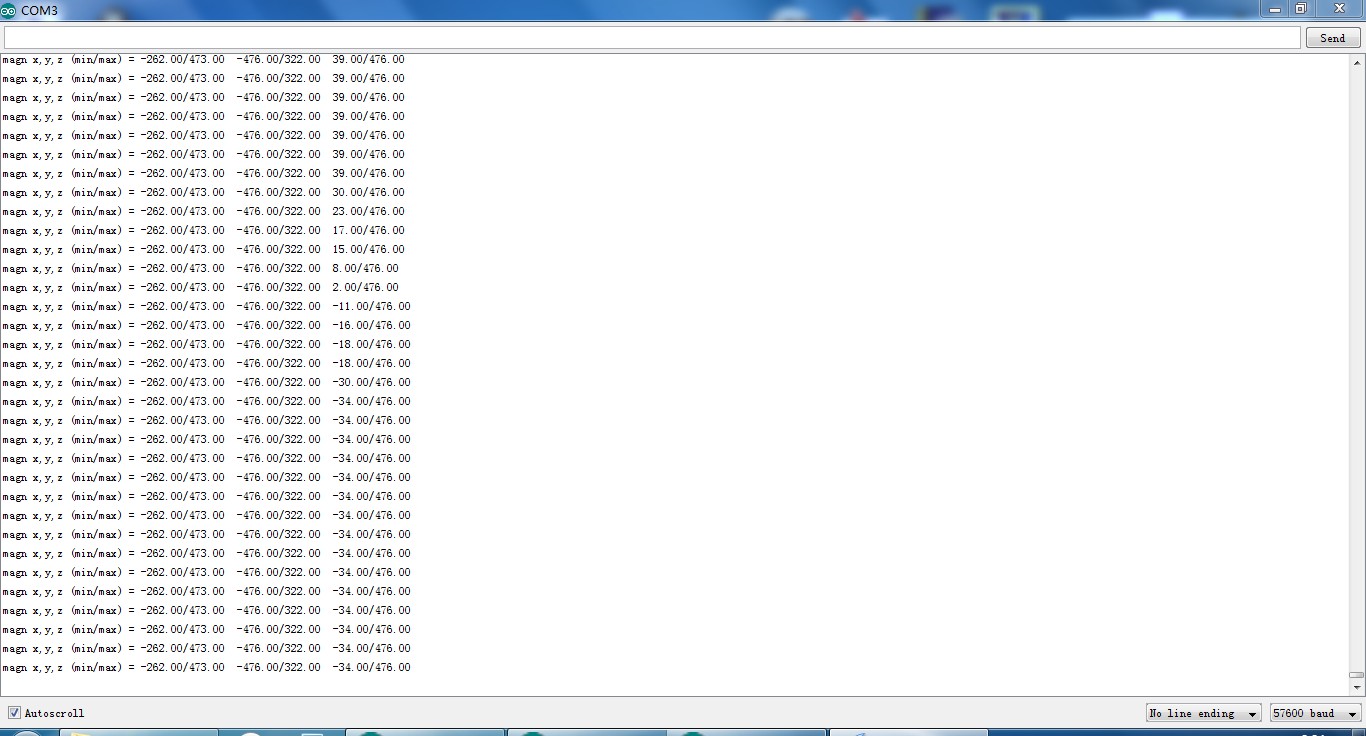
Agora você deve ter algo assim em seuMonitor Serial:
magn x,y,z (min/max) = -564,00/656,00 -585,00/635,00 -550,00/564,00Coloque esses valores em Razor_AHRS.ino.
Calibrando o giroscópio:
Agora você deve ter uma saída parecida com esta:
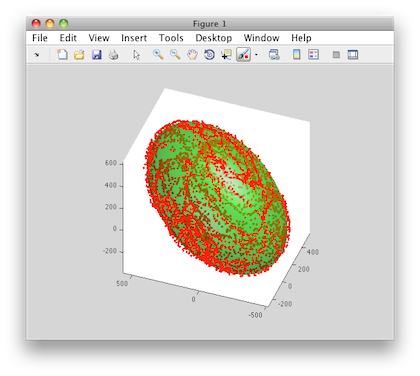
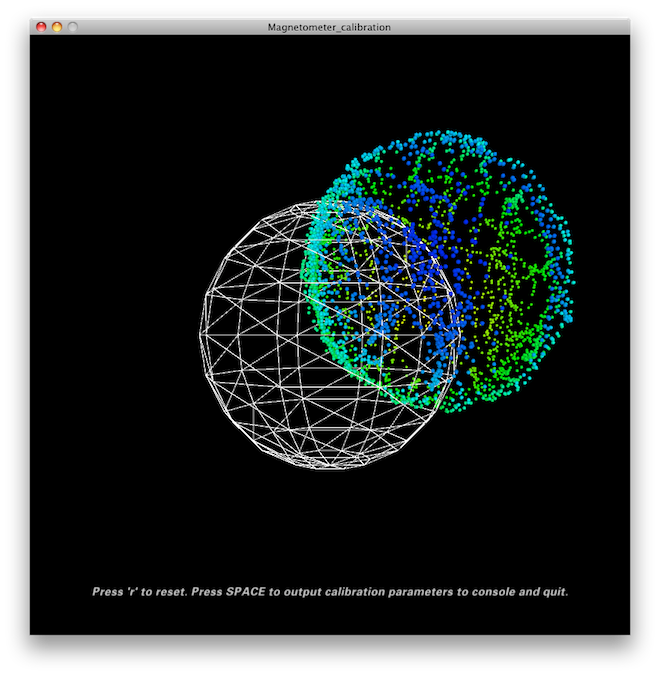
giroscópio x,y,z (atual/média) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Tente girar o sensor de forma a cobrir todas as orientações para produzir pontos que cubram a esfera de maneira mais ou menos uniforme.
Em um ambiente quase sem distorções, isso poderia ser algo como isto:
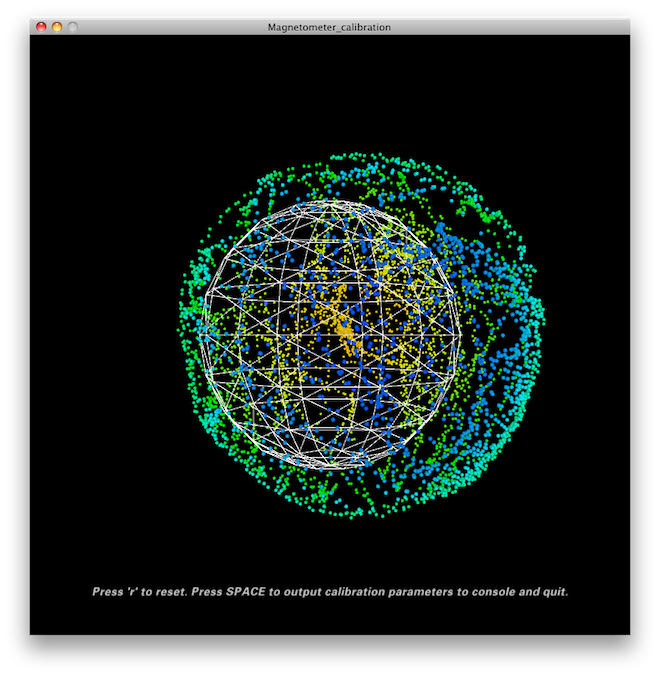
Pressione ESPAÇO e assista aoEm processamentoconsole - você encontrará algumas linhas de código que precisa inserir no firmware em "ÁREA DE CONFIGURAÇÃO DO USUÁRIO" / "CALIBRAÇÃO DO SENSOR" e pronto.
Os dados coletados (os pontos) também são gravados em um arquivo magnetom.float na pasta do esboço. Agora, caso você possua o Matlab, emMatlab/magnetometer_calibration você encontrará um script chamado magnetometer_calibration.m que usa esse arquivo e produz alguns gráficos para você, para que você possa verificar visualmente a calibração.
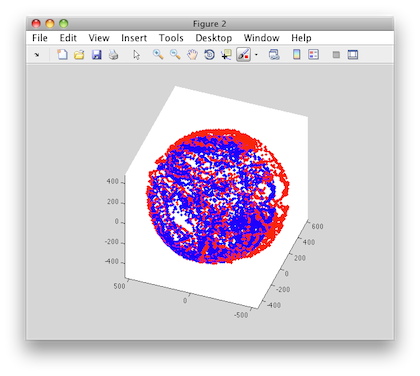
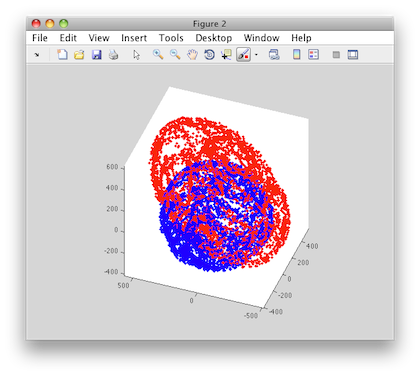
Ajuste do elipsóide e valores corrigidos:
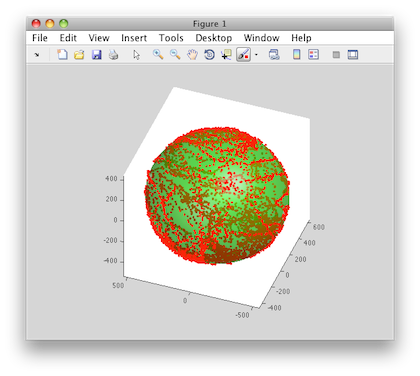
Valores brutos amostrados do magnetômetro:
Ajuste do elipsóide e valores corrigidos:
Envio | Prazo de Entrega | Para peças em estoque, os pedidos são estimados para serem enviados em 3 dias. A Elecbee envia pedidos uma vez por dia por volta das 17:00, exceto aos domingos. Após enviado, o prazo de entrega depende do transportador escolhido abaixo. DHL Express: 3-7 dias úteis DHLeCommerce: 12-22 dias úteis FedEx International Priority: 3-7 dias úteis EMS: 10-15 dias úteis Correio Aéreo Registrado: 15-30 dias úteis | |
| Taxas de Envio | As taxas de envio para seu pedido podem ser encontradas no carrinho de compras. | ||
| Opções de Envio | As taxas de envio para seu pedido podem ser encontradas no carrinho de compras. | ||
| Rastreamento de Envio | Notificaremos você por e-mail com o número de rastreamento assim que o pedido for enviado. Você pode rastrear seu pedido usando a funcionalidade "Rastrear Meu Pedido". | ||
| Devolução/Garantia | Devolução | Devoluções são normalmente aceitas se concluídas dentro de 30 dias a partir da data de envio. Entre em contato com o serviço ao cliente para autorização de devolução. As peças devem estar unused e na embalagem original. O cliente é responsável pelo frete. | |
| Garantia | Todas as compras na Elecbee vêm com uma política de devolução de dinheiro em 30 dias, além de 1 ano de garantia da Elecbee contra defeitos de fabricação. | ||
| Esta garantia não se aplica a itens onde os defeitos foram causados por montagem incorreta do cliente, falha em seguir instruções, modificação do produto, uso negligente ou inadequado. | |||
| Pedido | Como Comprar | Elecbee aceita pedidos online. | |
| Adicionar ao carrinho > Finalizar Compra > Enviar Pedido > Concluir Pagamento > Envio | |||
| Pagamento | PayPal, Cartão de Crédito (Visa, Mastercard, American Express), Transferência Bancária. | ||
