
製品を検索...

パワーアップするのもいいかもしれませんかみそりキャリブレーションの数分前に、センサーがウォームアップできるようにします。 初めてセンサーを調整するのは少し難しいかもしれませんが、やってみましょう:
ファームウェアのデフォルトを変更していない場合は、次のような出力が多数表示されるはずです。
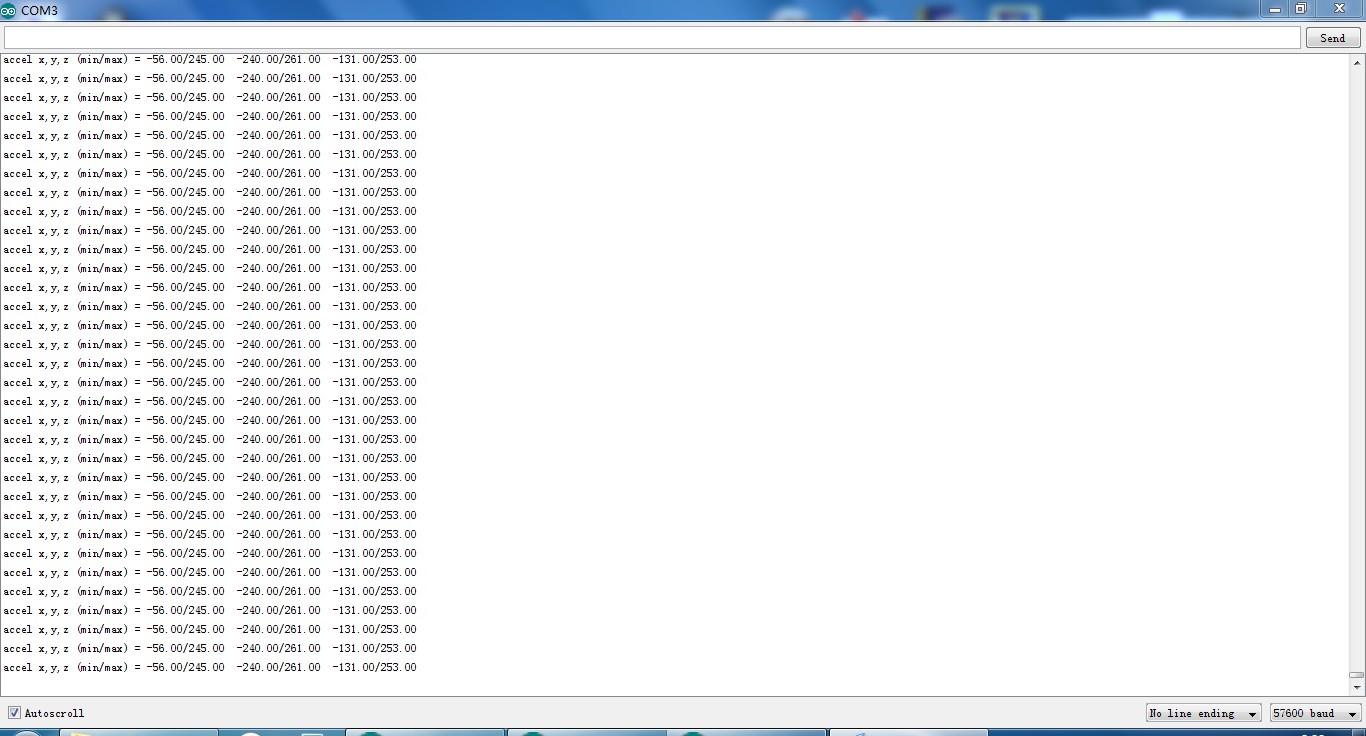
#YPR=-155.73,-76.48,-129.51ファームウェアを設定する出力モードに較正文字列 #oc を送信します。 次のような出力が表示されるはずです。
加速度 x,y,z (最小/最大) = -5.00/-1.00 25.00/29.00 225.00/232.00磁力計のキャリブレーション:
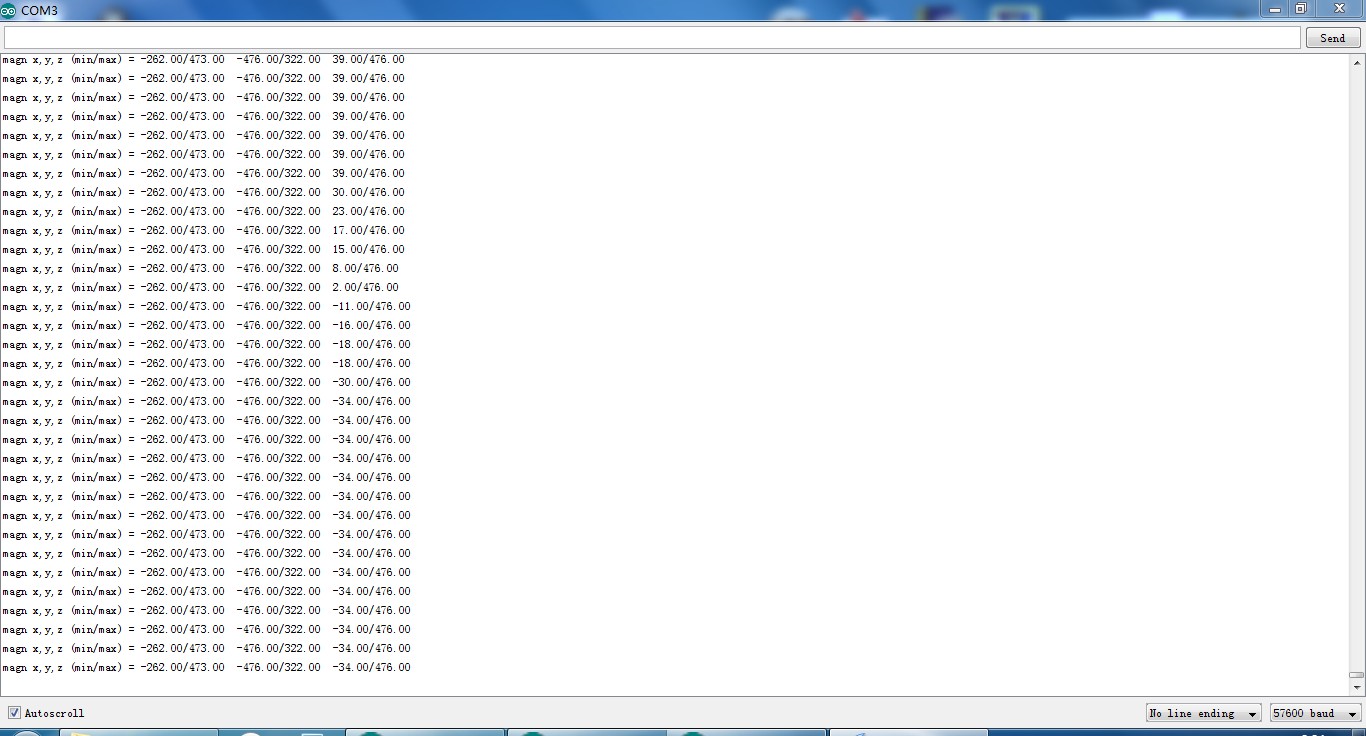
あなたは今、あなたの中にこのようなものを持っているはずですシリアルモニター:
倍率 x、y、z (最小/最大) = -564.00/656.00 -585.00/635.00 -550.00/564.00これらの値を Razor_AHRS.ino に入れます。
ジャイロスコープのキャリブレーション:
次のような出力が得られるはずです。
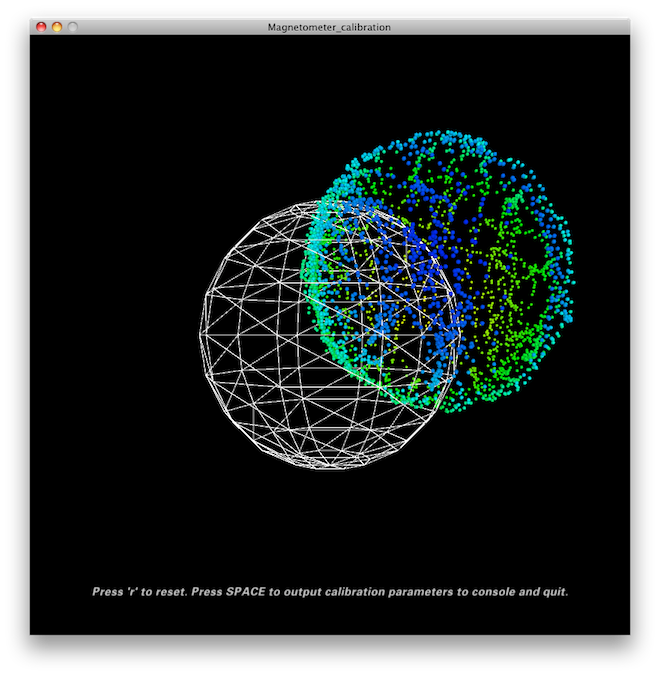
ジャイロ x,y,z (現在/平均) = -29.00/-27.98 102.00/100.51 -5.00/-5.85すべての方向をカバーするようにセンサーを回転させて、球を多かれ少なかれ均等にカバーするドットを生成するようにしてください。
ほとんど歪みのない環境では、これは次のようになります。
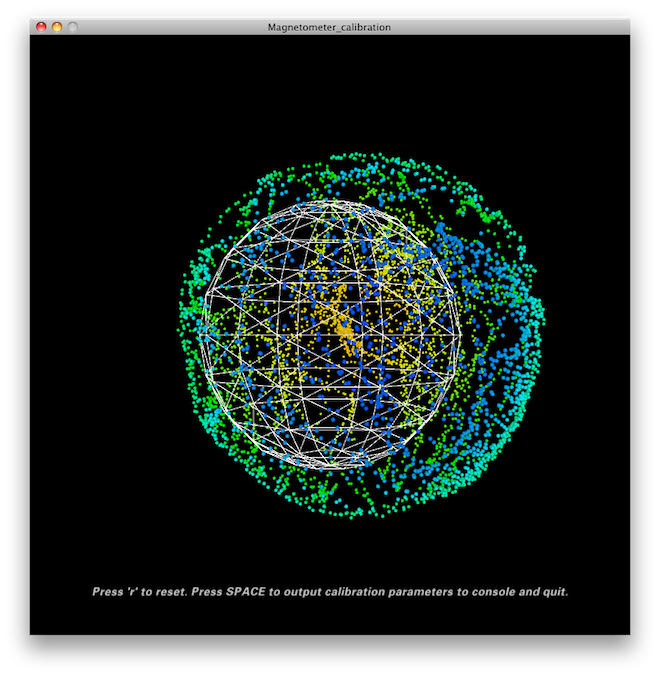
SPACE キーを押して、Processingconsole - 「USER SETUP AREA」/「SENSOR CALIBRATION」の下のファームウェアに入力する必要があるコード行がいくつか見つかります。これで完了です。
収集されたデータ(ドット)は、スケッチ フォルダ内のファイル magnetom.float にも書き込まれます。 Matlab を所有している場合は、Matlab/magnetometer_calibration の下に magnetometer_calibration.m というスクリプトがあり、このファイルを使用していくつかのプロットを生成するため、キャリブレーションを視覚的に確認できます。
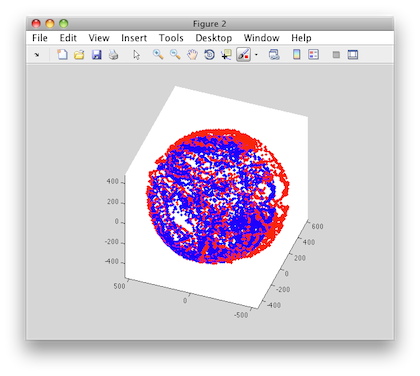
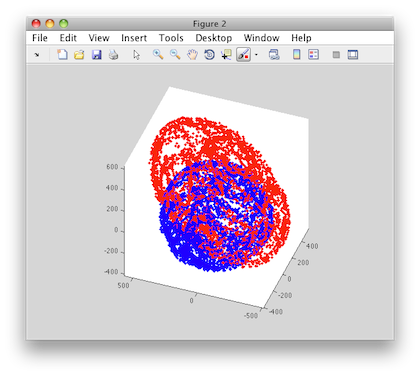
楕円体フィットと補正値:
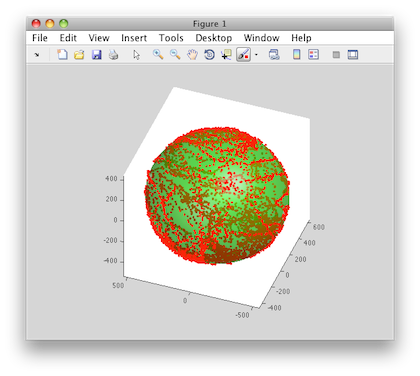
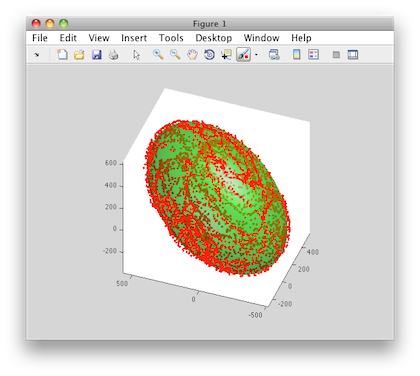
サンプリングされた生の磁力計値:
楕円体フィットと補正値:
配送 | 配送期間 | 在庫品は3日以内に発送予定です。 Elecbeeは毎日17時頃発送します(日曜を除く)。 発送後の到着予定日は選択した運送会社によって異なります。 DHLエクスプレス:3~7営業日 DHLeCommerce:12~22営業日 FedEx国際優先:3~7営業日 EMS:10~15営業日 書留航空便:15~30営業日 | |
| 送料 | 注文の送料はカートで確認できます。 | ||
| 配送オプション | 注文の送料はカートで確認できます。 | ||
| 物流追跡 | 注文発送後、メールで運送番号をお知らせします。「注文追跡」機能で物流状況を確認できます。 | ||
| 返品/保証 | 返品 | 返品は通常発送後30日以内に完了する必要があります。返品承認のためカスタマーサービスに連絡してください。商品は未使用で元の梱包を維持してください。送料は顧客負担です。 | |
| 保証 | すべてのElecbee購入商品は、30日間無条件返品ポリシーと1年間のElecbee製造欠陥保証を受けます。 | ||
| この保証は、顧客の不適切な組み立て、取扱説明書の不遵守、製品改変、過失または不適切な使用による欠陥品には適用されません。 | |||
| 注文 | 購入方法 | Elecbeeはオンライン注文をサポートしています。 | |
| カートに追加 > 決済 > 注文提出 > 支払い完了 > 発送 | |||
| 支払い | PayPal、クレジットカード(Visa、MasterCard、アメリカン・エキスプレス)、銀行振込。 | ||
