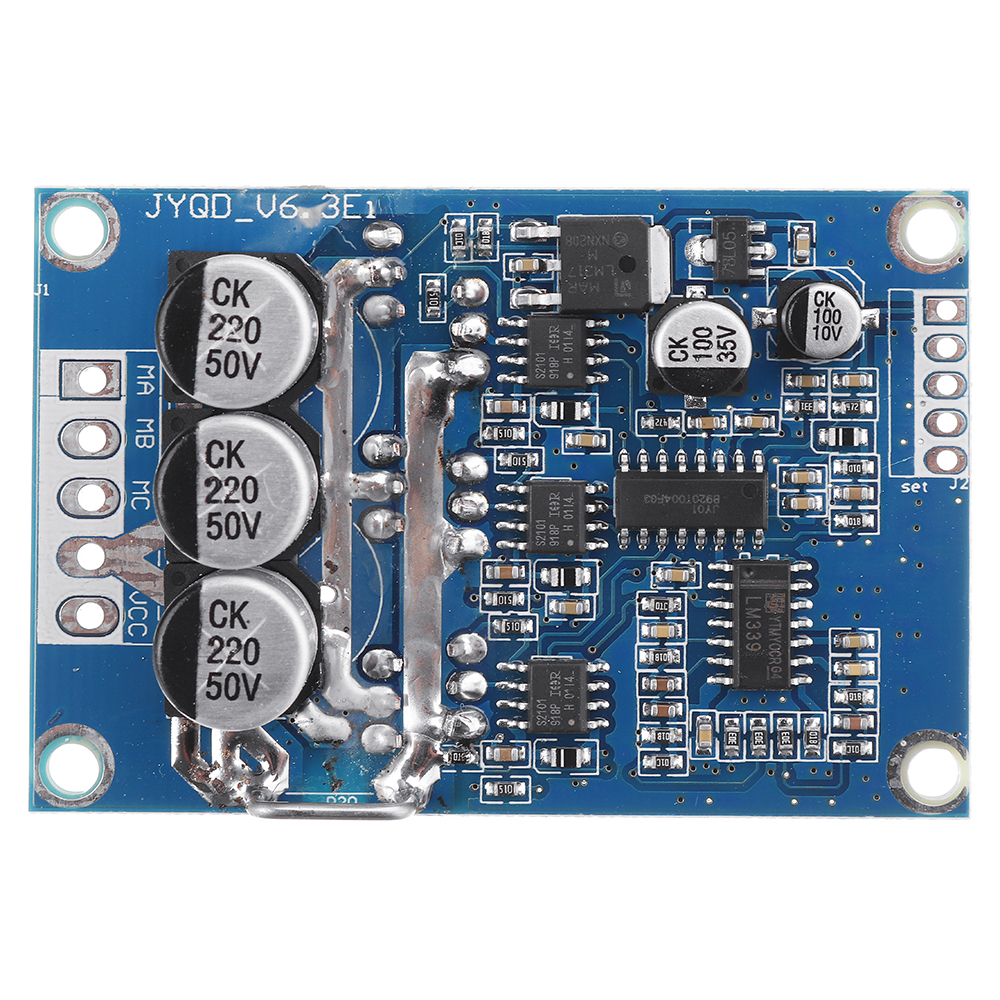
VCC(ポジティブ電源)
gnd(否定的なもの)
MC(運動相W)
MB(運動相V)
MA(モーターフェーズU)
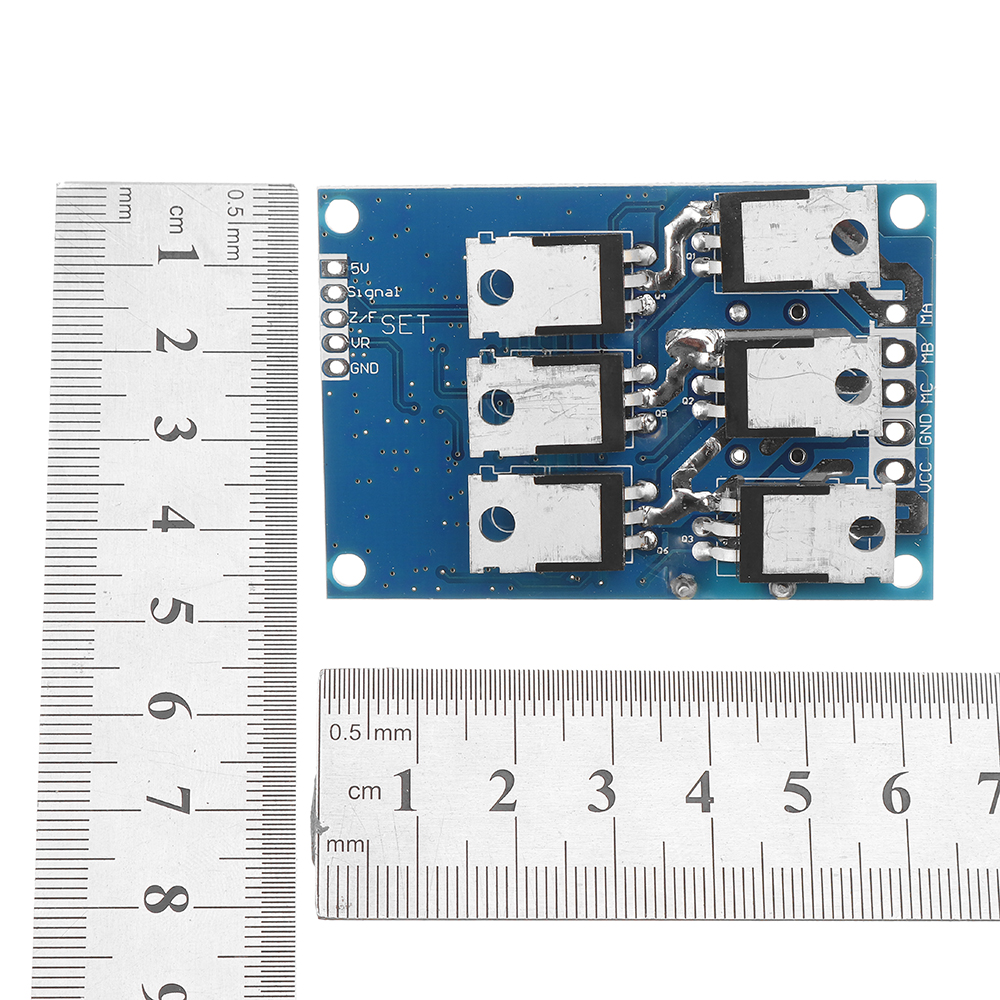
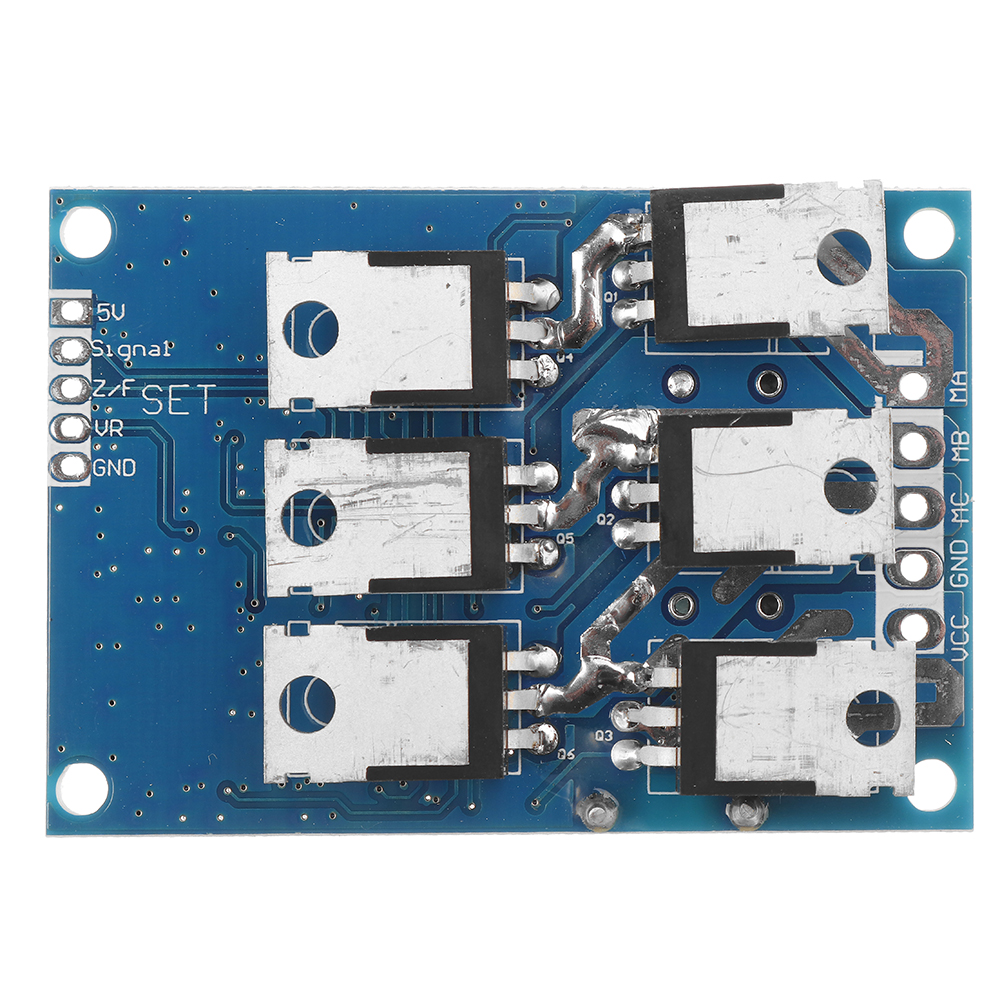
コントロール側に設定します:
GNDコントロール端子地面
VRガバナーエンド0-5V(モーター速度-100%の10%に対応)
ZF反転制御(5Vまたは地面に接続されている場合は、モーターの回転方向を充電できます)
Mタコメーターパルス出力(出力数の革命ごとのパルスの数に対応するモーターポールの数に応じて)
ELを有効に制御端子(5V OT地面に接続してから5Vに接続し、モーターの停止を接地します)
5V 5V制御端子
ホールターミナルのホール:
5V、ホールパワーポジティブ
ha、ホール信号
HB、ホール信号
HC、ホール信号
GND、ホールネガティブ
配線:
セットのコントロール端子:
1.モーター速度制御配線方法:利用可能なポテンショメータシステム速度はMCU制御に接続することもできます。ポテンショメータ制御配線、ポテンショメータ中央ピンがVR速度ポートに接続されている場合、ポテンショメーターは5VおよびGND末端電圧の両端に接続されています。
2。モーターステアリング制御配線方法:スイッチ制御をMCUコントロールに接続し、一方向にGNDに接続し、次に一方向に5V
3。パルス速度信号:高出力と低出力。 ICは顧客のリクエストで情報を理解できません
ホールのホール信号入力:
HA、HB、HCに対応する配線図が示されています。モーターでは、モーターHALに接続された5V電源が陽性で、GND電源マイナスマイナス信号がモーターホールに
注:ホールオブホールラインの注文を行うためのさまざまなモーターメーカーが、アレイに一致するようにボード上のラインを必ずしも追跡するわけではないため、調整する必要があります。注意を払ってください! ラインアレイが間違っている場合、適切に起動したり、電流を押したり、開いたりする他の現象を開始しない場合、ドライブプレートを使用することを余儀なくされます!!!
モータードライバーボード12-36V DC電源入力、VCCポジティブ電源、GND電源は負です
電気配線方法:3回のラインのブラシレスDCモーター、対応するMA/U、MB/V、MC/W
ヒント: 追加のヒートシンクなしで60W未満を使用する場合は、温度を下げることなく60Wを超えるヒートシンクフィンの効率を追加してください。 ヒートシンクのサイズは、悪い環境ベースの作業(200平方センチメートルを超える推奨冷却表面積)である可能性があります!ヒートシンクを取り付ける場合、モジュールの背面に6回のパイプ断熱材に注意を払う必要があり、断熱材なしで、プレートを恒久的に損傷します! 絶縁シートの両側に断熱フィルムとサーマルグリースを追加することを提案しています!
パッケージが含まれます:
1 xコントローラー

 0
0