
Cerca prodotti...
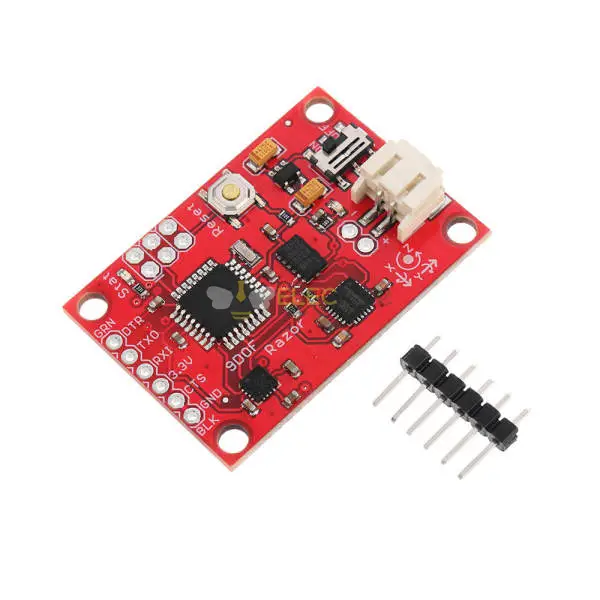

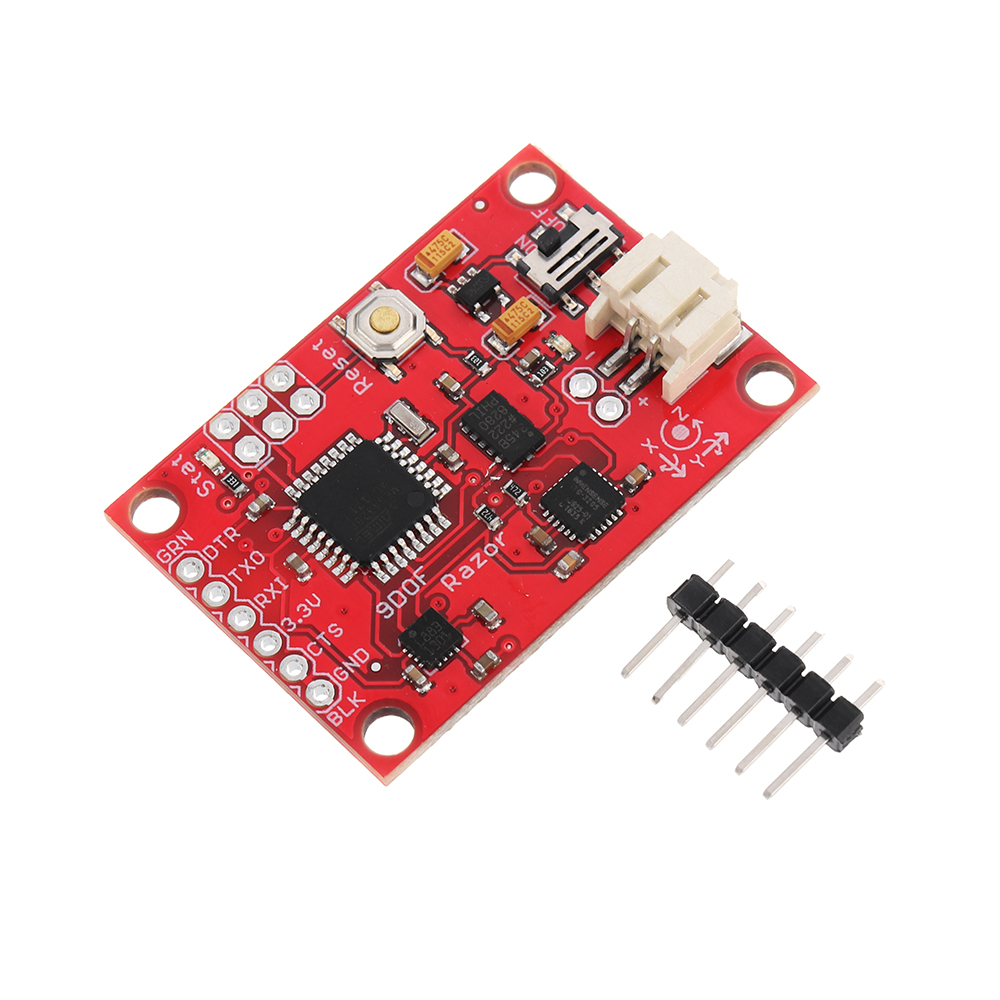
Potrebbe essere utile accendere ilRasoioalcuni minuti prima della calibrazione, in modo che i sensori possano riscaldarsi. Calibrare i sensori la prima volta può essere un po' complicato, ma andiamo:
Se non hai modificato le impostazioni predefinite del firmware, dovresti vedere un sacco di output come questo:
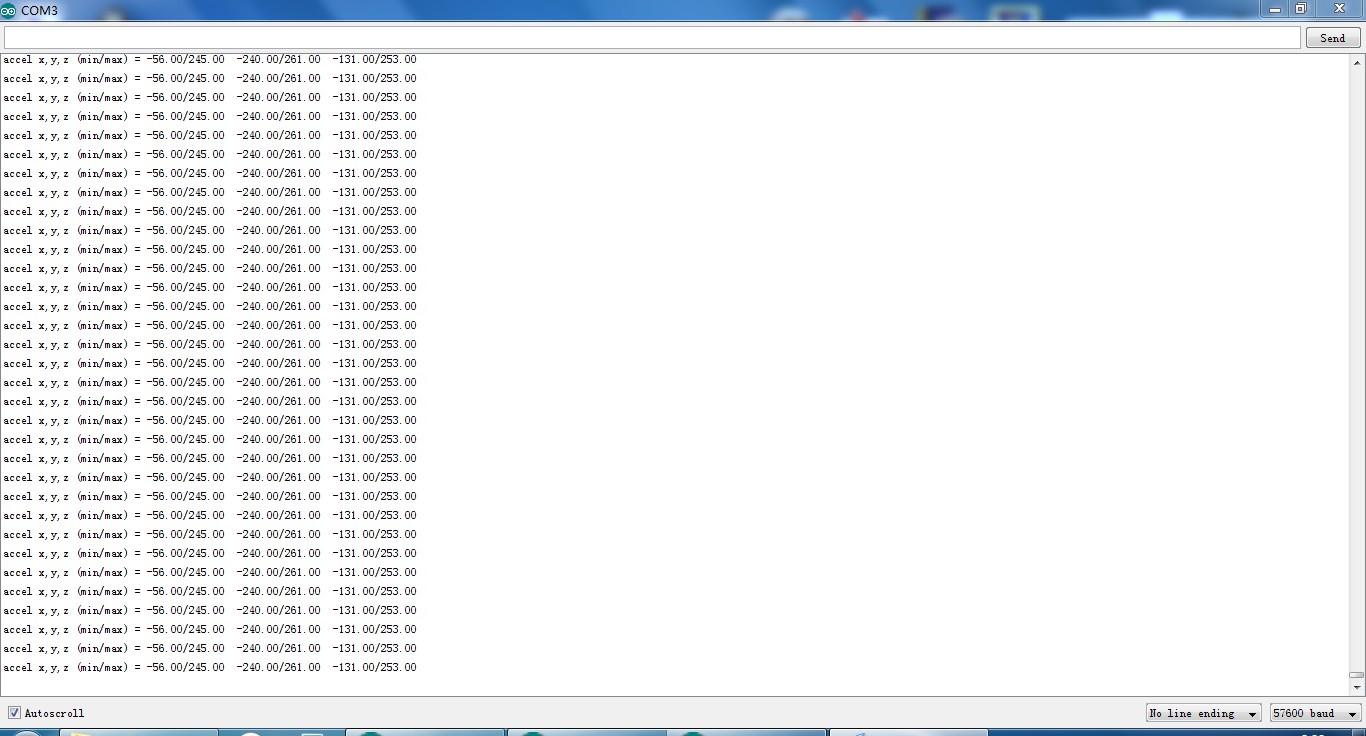
#YPR=-155.73,-76.48,-129.51Imposta il firmwaremodalità di uscitaAcalibrazioneinviando la stringa #oc. Ora dovresti vedere un output come questo:
accelerazione x,y,z (min/max) = -5.00/-1.00 25.00/29.00 225.00/232.00Taratura del magnetometro:
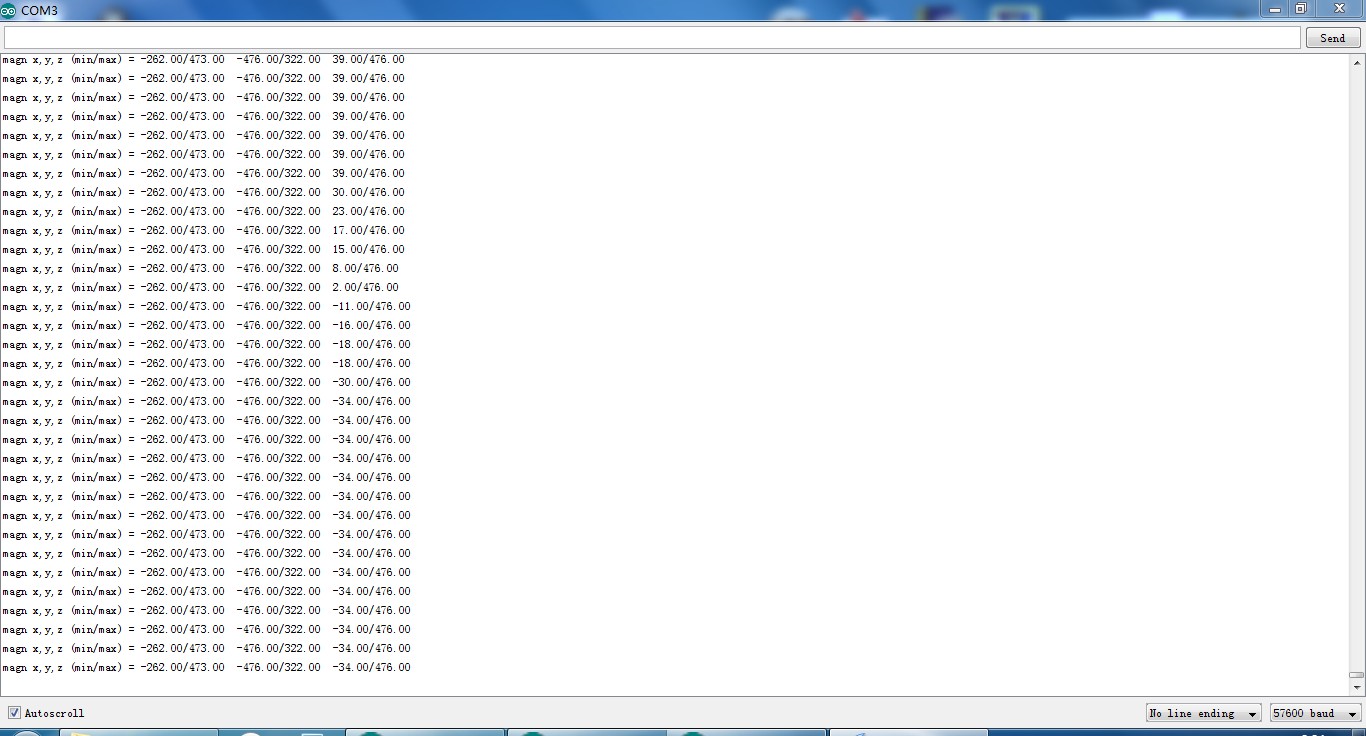
Ora dovresti avere qualcosa di simile nel tuoMonitor seriale:
magn x,y,z (min/max) = -564.00/656.00 -585.00/635.00 -550.00/564.00Inserisci questi valori in Razor_AHRS.ino.
Calibrare il giroscopio:
Ora dovresti avere un output simile a questo:
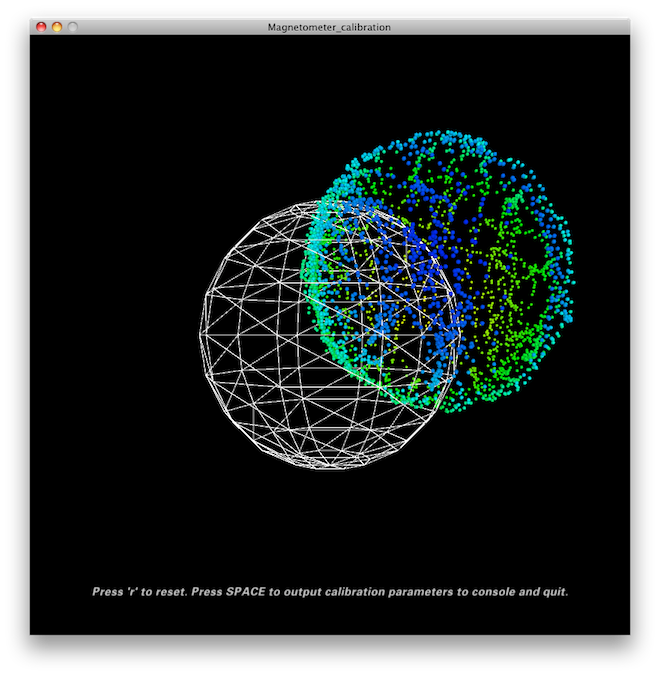
giroscopio x,y,z (corrente/media) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Prova a ruotare il sensore in modo da coprire tutti gli orientamenti in modo da produrre punti che coprano più o meno uniformemente la sfera.
In un ambiente per lo più non distorto, questo potrebbe assomigliare a questo:
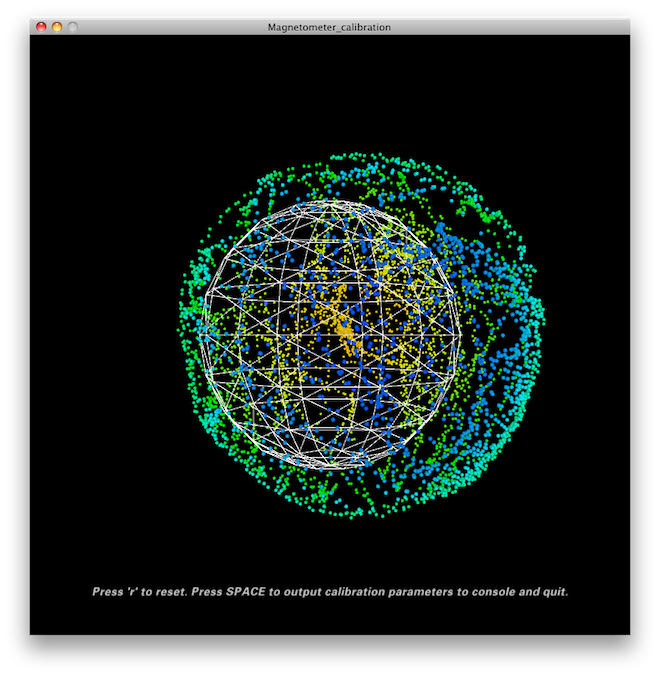
Premi SPAZIO e guarda ilin lavorazioneconsole: troverai alcune righe di codice che devi inserire nel firmware in "AREA DI CONFIGURAZIONE UTENTE" / "CALIBRAZIONE SENSORE" e il gioco è fatto.
I dati raccolti (i punti) vengono scritti anche in un file magnetom.float nella cartella dello schizzo. Ora, se possiedi Matlab, in Matlab/magnetometer_calibration troverai uno script chiamato magnetometer_calibration.m che utilizza questo file e produce alcuni grafici per te, in modo da poter controllare visivamente la calibrazione.
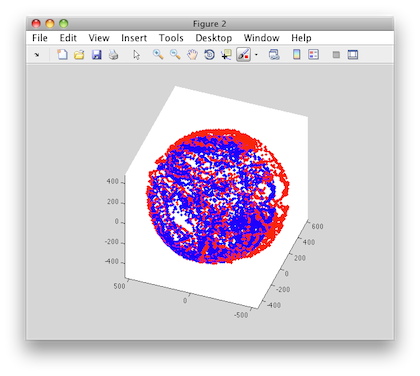
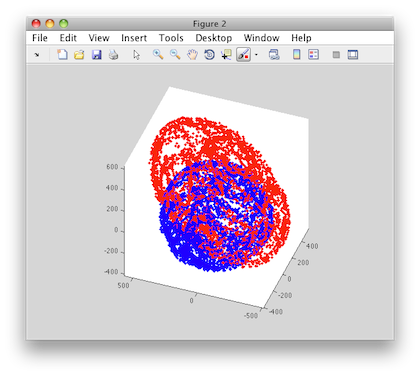
Adattamento dell'ellissoide e valori corretti:
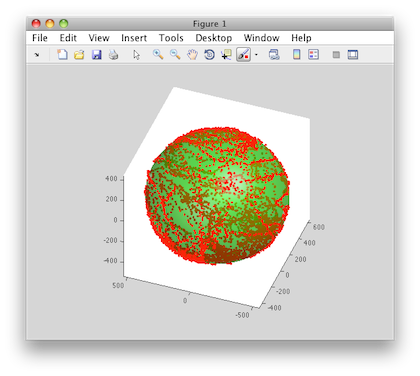
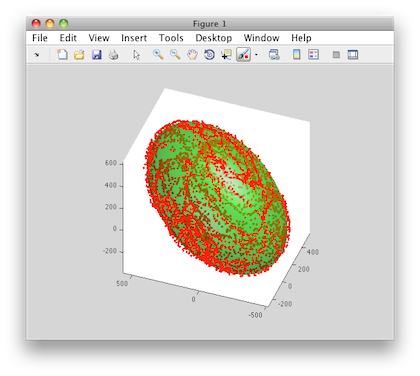
Valori grezzi del magnetometro campionati:
Adattamento dell'ellissoide e valori corretti:
Spedizione | Tempo di consegna | Per articoli in magazzino, gli ordini sono stimati per essere spediti in 3 giorni. Elecbee spedisce ordini una volta al giorno verso le 17:00 (escluso domenica). Una volta spedito, il tempo di consegna dipende dal corriere scelto. DHL Express: 3-7 giorni lavorativi DHLeCommerce: 12-22 giorni lavorativi FedEx International Priority: 3-7 giorni lavorativi EMS: 10-15 giorni lavorativi Posta aerea registrata: 15-30 giorni lavorativi | |
| Spese di spedizione | Le spese di spedizione per il tuo ordine sono disponibili nel carrello. | ||
| Opzioni di spedizione | Le spese di spedizione per il tuo ordine sono disponibili nel carrello. | ||
| Tracciamento spedizione | Dopo l'invio, ti invieremo il numero di tracciamento per email. Puoi monitorare l'ordine con la funzione "Traccia il mio ordine". | ||
| Reso/Garanzia | Reso | I resi sono generalmente accettati entro 30 giorni dalla data di spedizione. Contatta il servizio clienti per autorizzazione. I prodotti devono essere non utilizzati e nella confezione originale. Il cliente è responsabile delle spese di spedizione. | |
| Garanzia | Tutti gli acquisti Elecbee includono una politica di rimborso 30 giorni e una garanzia di 1 anno contro difetti di fabbricazione. | ||
| Questa garanzia non si applica a prodotti difettosi causati da montaggio errato del cliente, mancato rispetto delle istruzioni, modifica del prodotto, uso negligente o improprio. | |||
| Ordine | Come acquistare | Elecbee supporta ordini online. | |
| Aggiungi al carrello > Checkout > Invia ordine > Completa pagamento > Spedizione | |||
| Pagamento | PayPal, carta di credito (Visa, MasterCard, American Express), bonifico bancario. | ||
