
Rechercher des produits...

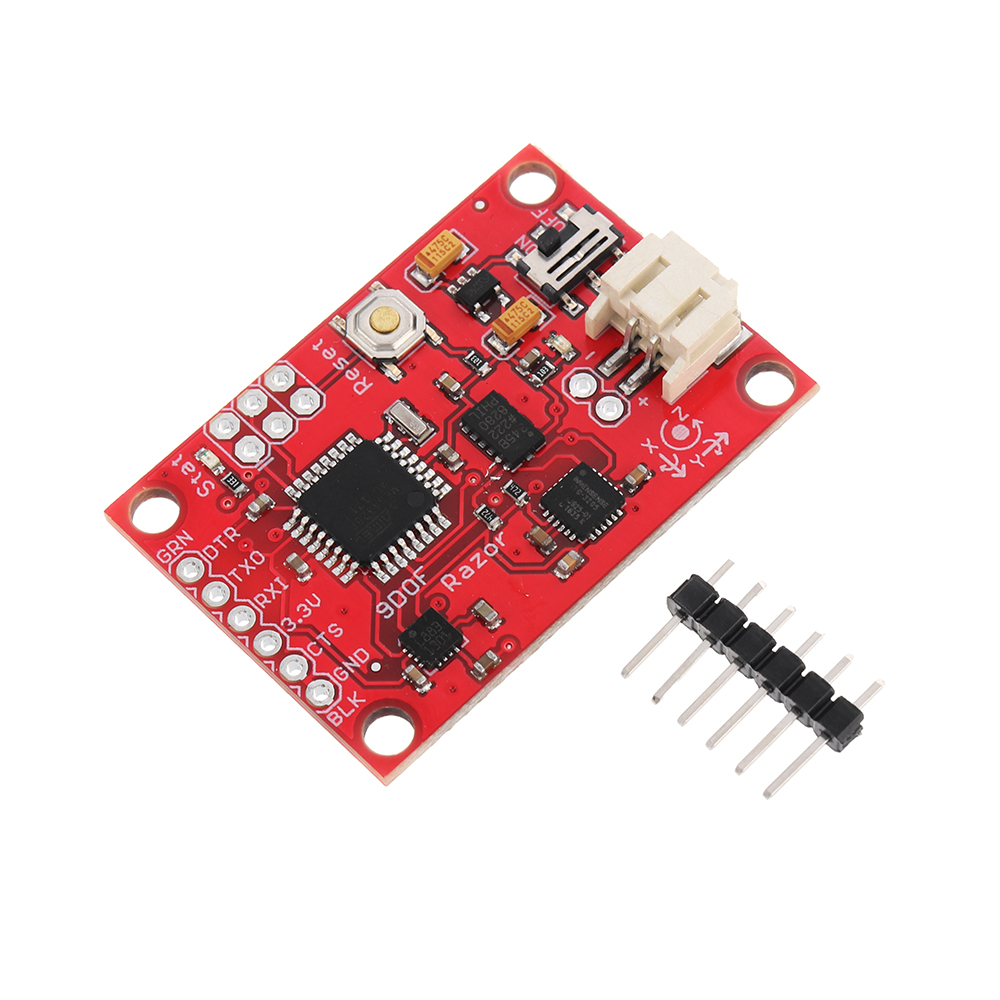
Il serait peut-être bon d'allumer leLe rasoirquelques minutes avant l'étalonnage, afin que les capteurs puissent se réchauffer. Étalonner les capteurs la première fois peut être un peu délicat, mais allons-y :
Si vous n'avez pas modifié les paramètres par défaut du micrologiciel, vous devriez voir de nombreuses sorties comme celle-ci :
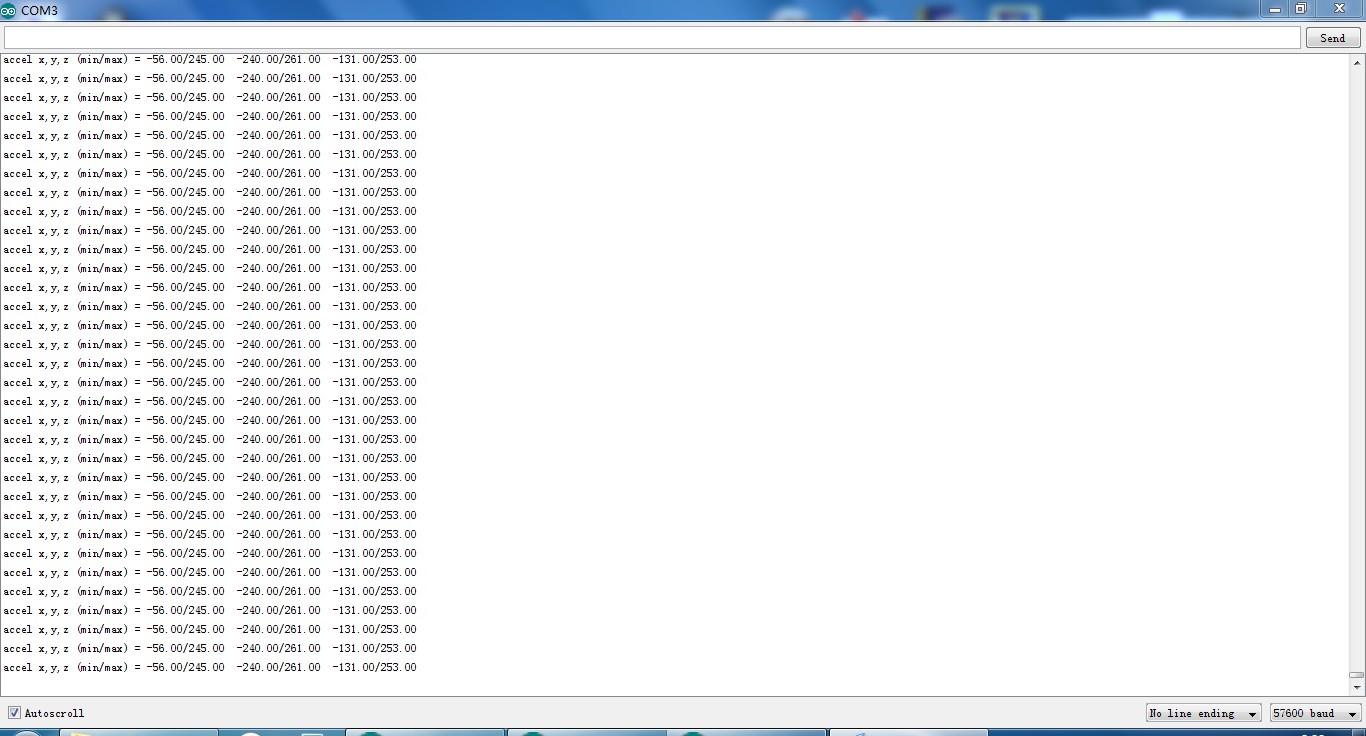
#YPR=-155.73,-76.48,-129.51Définir le micrologicielmode de sortiepourétalonnageen envoyant la chaîne #oc. Vous devriez maintenant voir une sortie comme celle-ci :
accel x,y,z (min/max) = -5.00/-1.00 25.00/29.00 225.00/232.00Étalonnage du magnétomètre:
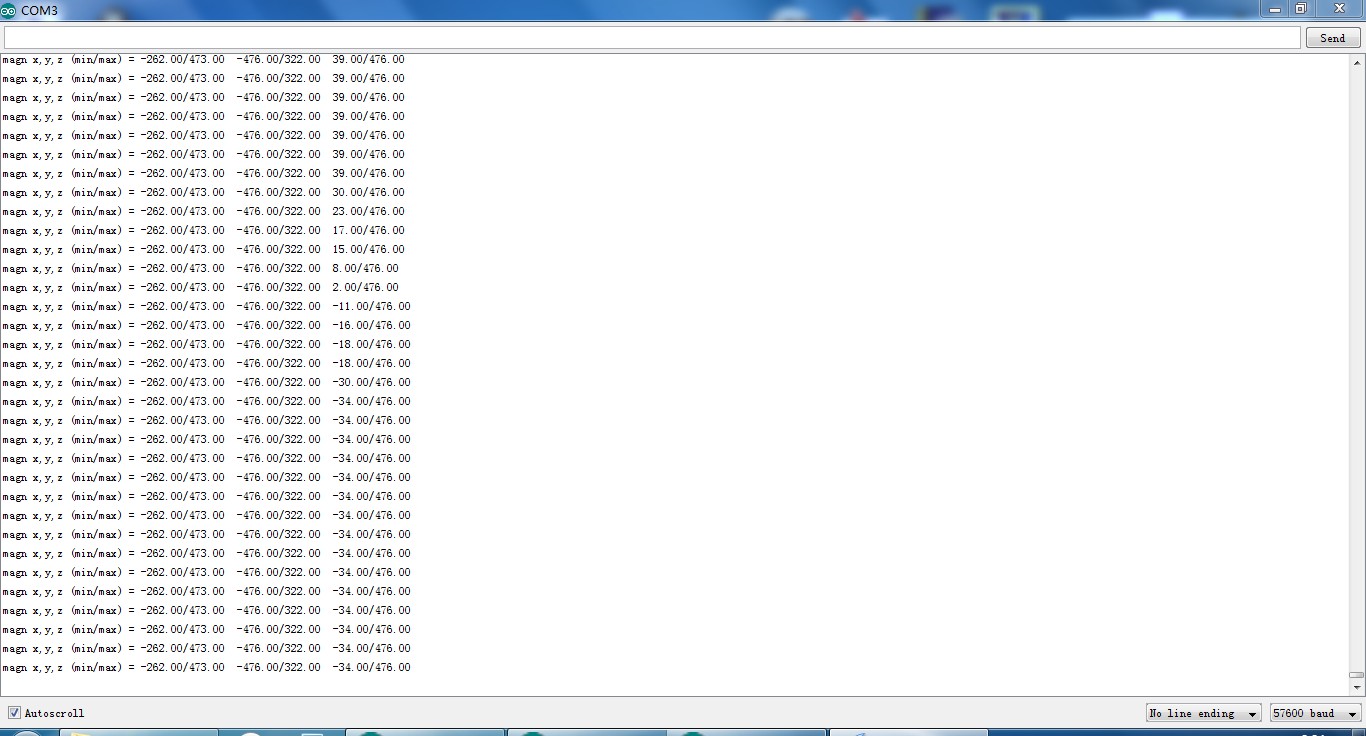
Vous devriez maintenant avoir quelque chose comme ça dans votreMoniteur série:
magn x,y,z (min/max) = -564,00/656,00 -585,00/635,00 -550,00/564,00Mettez ces valeurs dans Razor_AHRS.ino.
Calibrage du gyroscope:
Vous devriez maintenant avoir une sortie qui ressemble à ceci :
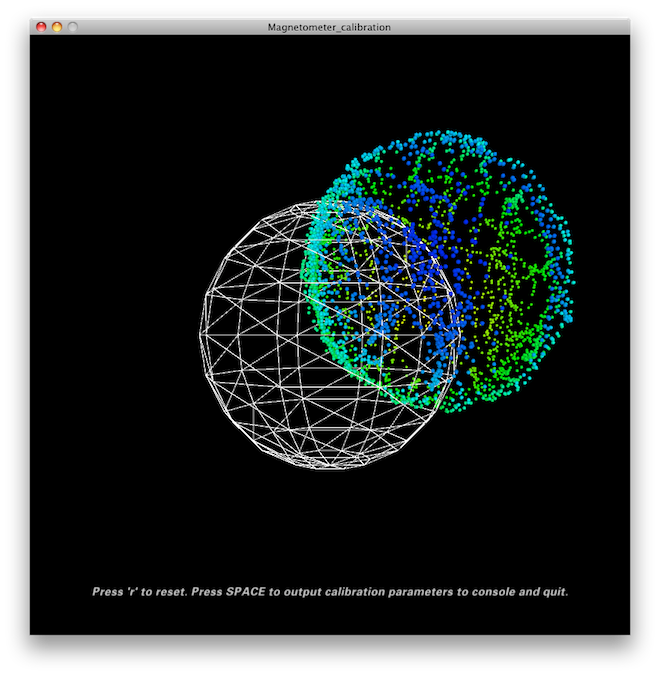
gyroscope x,y,z (actuel/moyen) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Essayez de faire pivoter le capteur de manière à couvrir toutes les orientations afin de produire des points qui couvrent plus ou moins uniformément la sphère.
Dans un environnement essentiellement non déformé, cela pourrait ressembler à ceci :
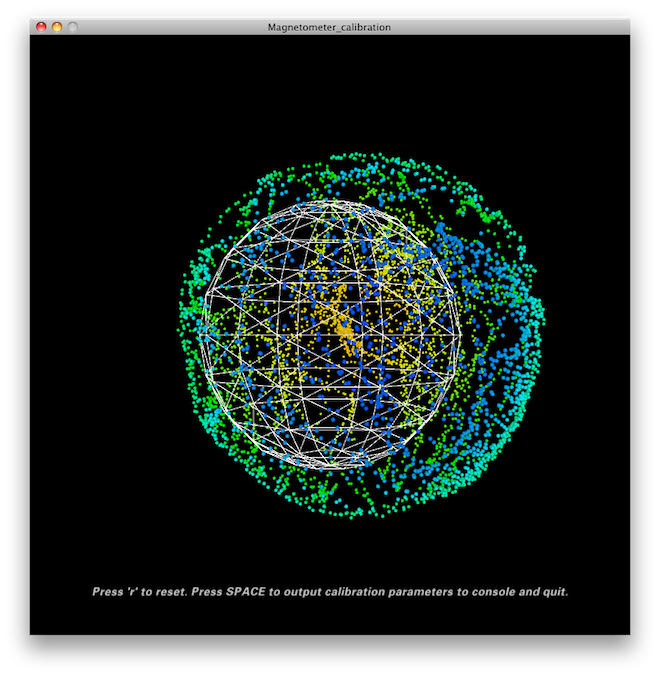
Appuyez sur ESPACE et regardez laTraitementconsole - vous trouverez quelques lignes de code que vous devez insérer dans le micrologiciel sous "USER SETUP AREA" / "SENSOR CALIBRATION" et vous avez terminé.
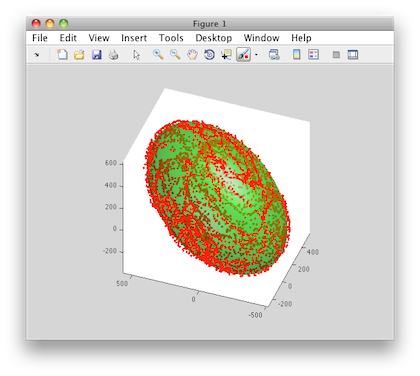
Les données collectées (les points) sont également écrites dans un fichier magnetom.float dans le dossier sketch. Maintenant, si vous possédez Matlab, sous Matlab/magnetometer_calibration vous trouverez un script appelé magnetometer_calibration.m qui utilise ce fichier et produit des tracés pour vous, afin que vous puissiez vérifier visuellement l'étalonnage.
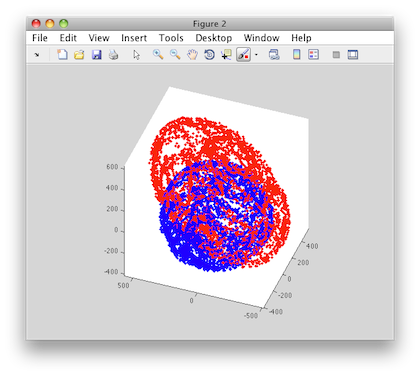
Ajustement d'ellipsoïde et valeurs corrigées :
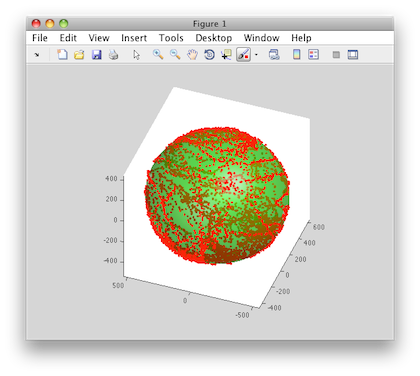
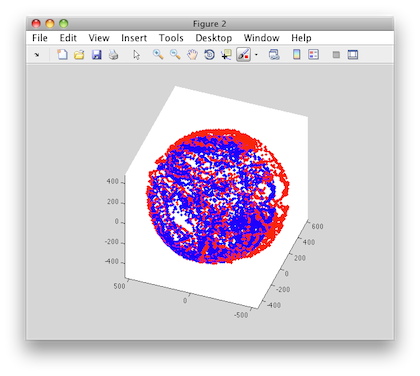
Valeurs brutes échantillonnées du magnétomètre :
Ajustement d'ellipsoïde et valeurs corrigées :
Livraison | Délai de livraison | Pour les articles en stock, les commandes sont généralement expédiées sous 3 jours. Elecbee expédie les commandes quotidiennement vers 17h (hors dimanche). Le temps d'arrivée après expédition dépend du transporteur choisi. DHL Express : 3-7 jours ouvrables DHLeCommerce : 12-22 jours ouvrables FedEx International Priority : 3-7 jours ouvrables EMS : 10-15 jours ouvrables Courrier aérien recommandé : 15-30 jours ouvrables | |
| Frais de port | Les frais de livraison de votre commande sont consultables dans le panier. | ||
| Options de livraison | Les frais de livraison de votre commande sont consultables dans le panier. | ||
| Suivi de livraison | Après l'expédition, nous vous enverrons le numéro de suivi par email. Utilisez la fonction « Suivre ma commande » pour consulter l'état. | ||
| Retour/Garantie | Retour | Les retours sont généralement acceptés sous 30 jours à partir de l'expédition. Contactez le service client pour autorisation. Les produits doivent être non utilisés et dans leur emballage d'origine. Les frais de retour sont à la charge du client. | |
| Garantie | Tous les achats Elecbee incluent une politique de retour de 30 jours et une garantie de 1 an contre les défauts de fabrication. | ||
| Cette garantie ne s'applique pas aux produits défectueux dus à un mauvais assemblage par le client, non-respect des instructions, modification du produit, négligence ou mauvaise utilisation. | |||
| Commande | Comment acheter | Elecbee prend en charge les commandes en ligne. | |
| Ajouter au panier > Paiement > Soumettre la commande > Finaliser le paiement > Expédition | |||
| Paiement | PayPal, carte de crédit (Visa, MasterCard, American Express), virement bancaire. | ||
