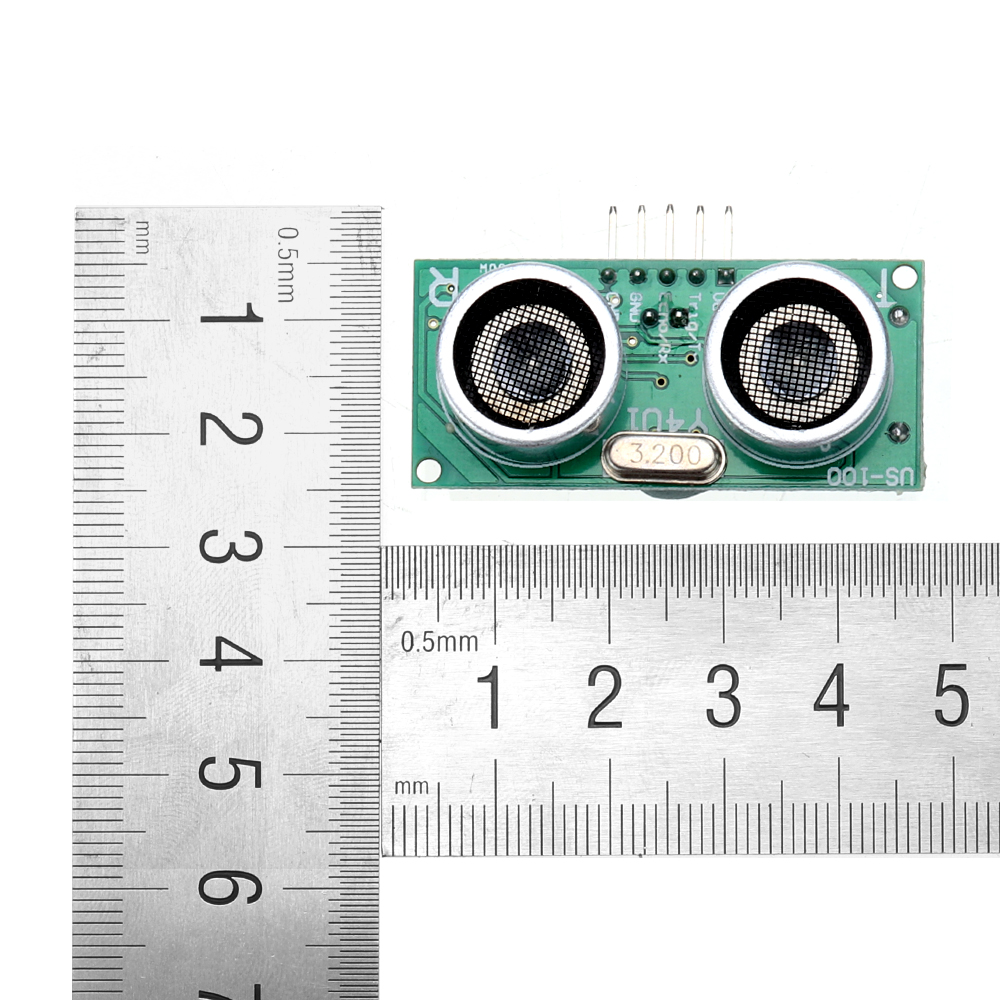
Caractéristique:
Le module de télémétrie à ultrasons US-100 peut fournir une fonction de détection de distance sans contact de 2 cm à 450 cm, une large tension de fonctionnement, un capteur de température autonome pour corriger le résultat de la télémétrie, et dispose également d'un GPIO, d'un port série et d'autres méthodes de communication. Le chien est stable et fiable.
Le module comprend un émetteur, un récepteur et un circuit de commande, qui est un capteur piézoélectrique fabriqué à l'aide de phénomènes électrostrictifs.
Une tension alternative est appliquée au matériau piézoélectrique S pou (tel que le cristal de quartz, la céramique piézoélectrique, le titanate de bismuth de plomb, etc.) pour lui faire générer des vibrations électrostrictives afin de générer des ondes ultrasonores. La résonance est générée lorsque la fréquence de la tension alternative appliquée est égale à la fréquence naturelle de la plaquette, et l'onde ultrasonore générée à ce moment est la plus forte.
Les récepteurs ultrasonores piézoélectriques fonctionnent généralement en utilisant l'effet inverse d'un générateur d'ultrasons. La structure est fondamentalement la même que celle d'un générateur d'ultrasons, et parfois le même transducteur est utilisé à la fois comme générateur et comme récepteur.
Lorsque l'onde ultrasonore agit sur la plaquette piézoélectrique, la plaquette est étirée et contractée, et des charges alternatives sont générées aux deux interfaces de la plaquette, puis converties en une tension et amplifiées pour être envoyées au circuit de mesure, et enfin enregistrées ou affiché.| Paramètres électriques | Module de télémétrie à ultrasons US-100 |
| Tension de fonctionnement | CC 2.4V ~ 5.5V |
| Courant de repos | 2mA |
| Température de fonctionnement | -20 ~ + 70 degrés |
| méthode de sortie | Niveau ou UART (sélection de capuchon de cavalier) |
| Angle d'induction | Moins de 15 degrés |
| Distance de détection | 2cm-450cm |
| Précision de détection | 0.3cm+1% |
| Configuration du port série en mode UART | Le débit en bauds est de 9600, le bit de démarrage est de 1 bit, le bit d'arrêt est de 1 bit, le bit de données est de 8 bits, il n'y a pas de parité, pas de contrôle de flux. |
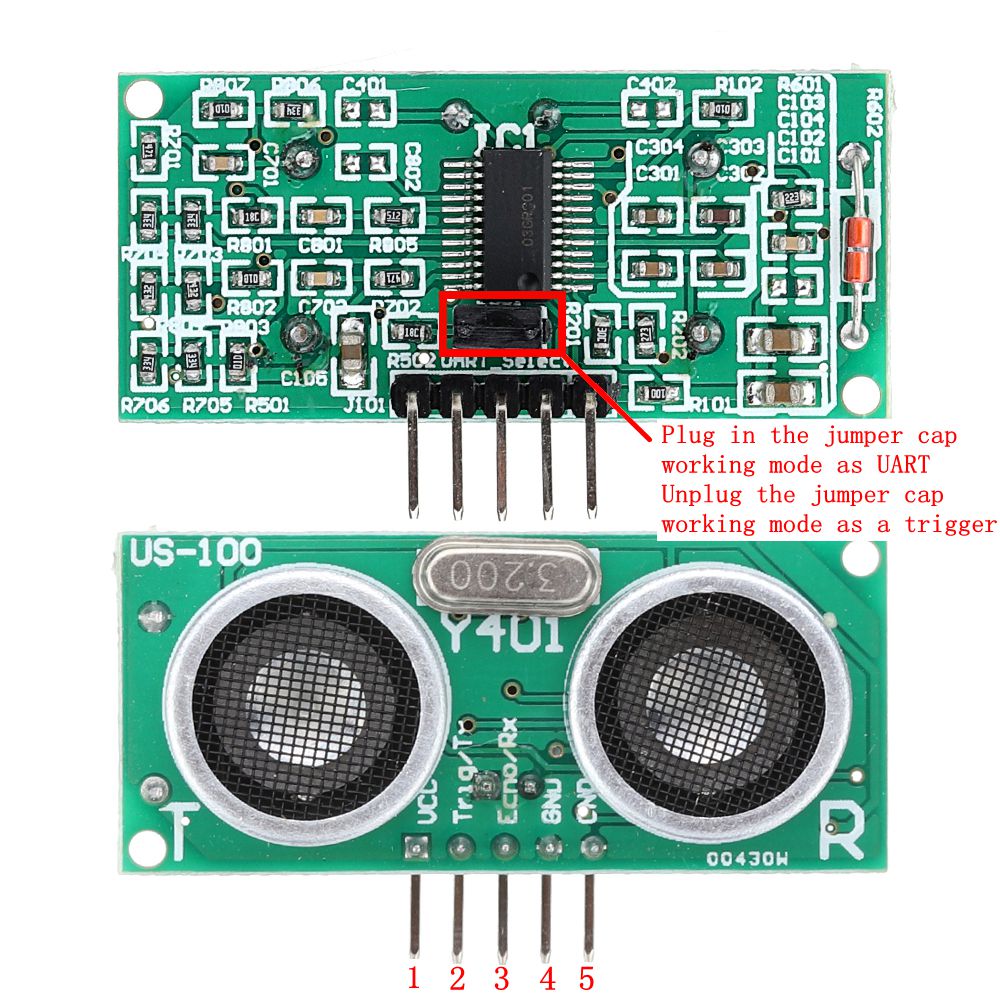
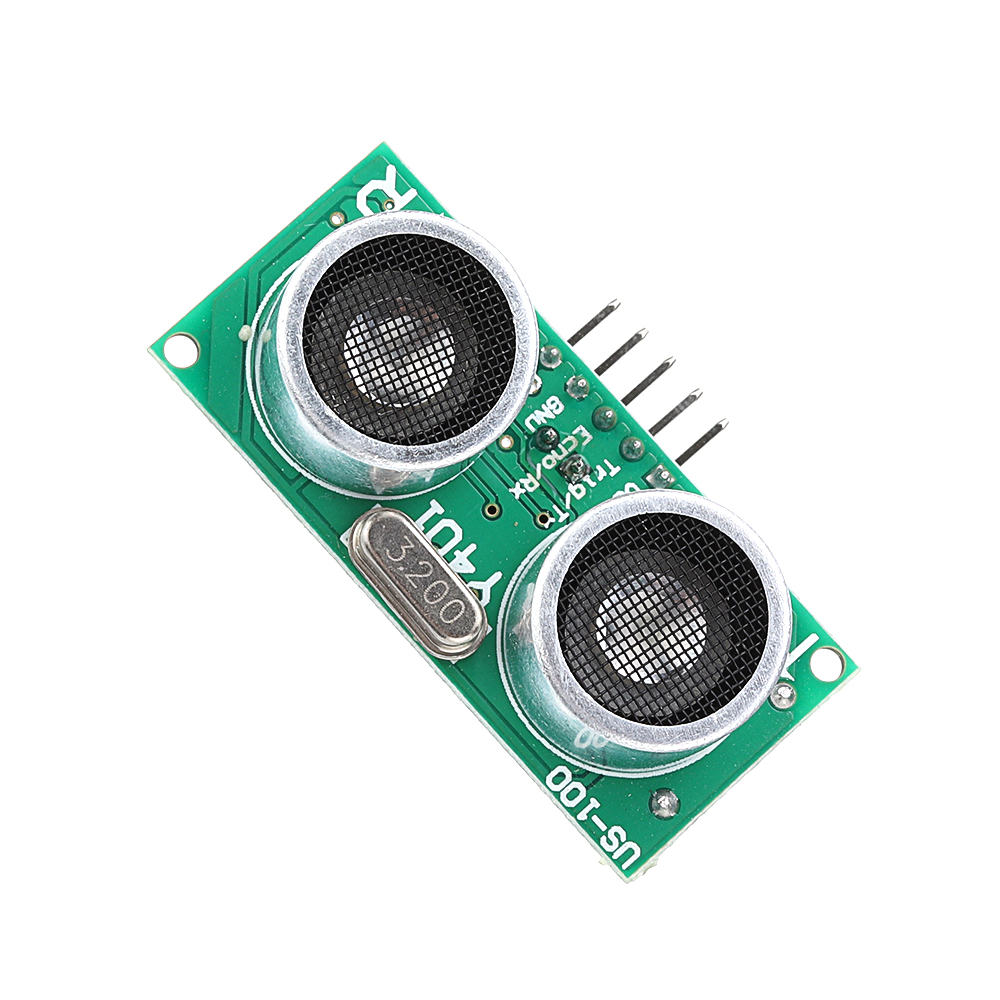
Broche 1 : connectez-vous à l'alimentation VCC (DC 2,4 V-5,5 V).
Pin 2 : lorsqu'il est en mode UART, il est connecté à la borne TX du circuit externe UART ; lorsqu'il est en mode de déclenchement de niveau, il est connecté à la borne Trig du circuit externe.
Broche 3 : en mode UART, connectez-vous à la borne RX du circuit externe UART ; lorsqu'il est en mode de déclenchement de niveau, connectez-vous à la borne Echo du circuit externe.
Broche 4/5 : connectez la masse du circuit externe et les deux broches sont allumées.
La télémétrie déclenchée par le niveau fonctionne :
Avant de mettre le module sous tension, retirez d'abord le capuchon du cavalier sur le cavalier de sélection de mode pour mettre le module en mode de déclenchement de niveau.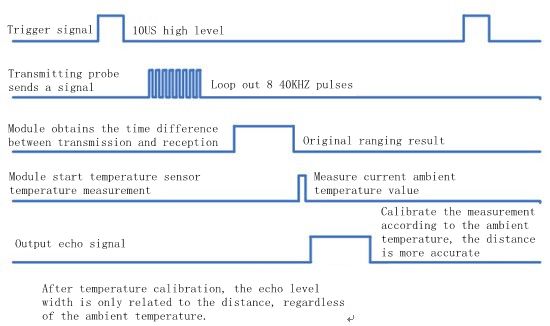
On peut voir sur la figure que seul un niveau élevé de 10US ou plus est requis pour être entré sur la broche Trig/TX, et le système peut envoyer huit impulsions ultrasonores de 40KHZ, puis détecter le signal d'écho. Lorsque le signal d'écho est détecté, le module mesure également la valeur de la température, puis corrige le résultat de la plage en fonction de la température actuelle et émet le résultat corrigé via la broche Echo/RX. Dans ce mode, le module convertit la valeur de distance en deux fois la valeur de temps à 340 m/s, émet un niveau élevé via le terminal Echo et démarre simultanément la minuterie et peut lire la minuterie lorsque le port devient faible. La valeur du niveau haut est le temps entre la transmission et le retour de l'onde ultrasonore. La valeur de la distance peut être calculée en fonction de la durée de ce niveau haut. C'est-à-dire que la valeur de la distance est : (heure élevée *340 m/s)/2.
Remarque : La valeur de distance ayant été corrigée en température, il n'est plus nécessaire de corriger la vitesse du son ultrasonique en fonction de la température ambiante, c'est-à-dire que la vitesse du son est de 340 m/s quelle que soit la température.
La plage de déclenchement du port série fonctionne :
Avant la mise sous tension du module, branchez d'abord le capuchon du cavalier sur le cavalier de sélection de mode pour mettre le module en mode de déclenchement du port série.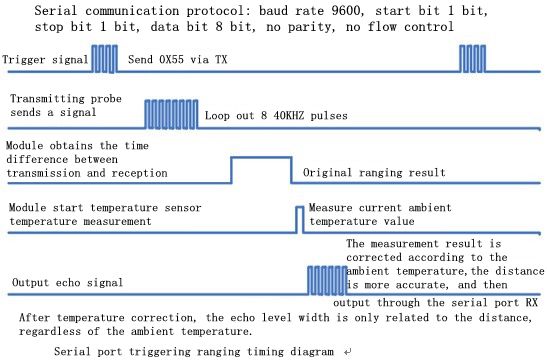
Dans ce mode, il suffit d'entrer 0X55 (débit en bauds 9600) sur la broche Trig/TX, le système peut envoyer 8 impulsions ultrasonores de 40 KHZ, puis détecter le signal d'écho. Lorsque le signal d'écho est détecté, le module mesure également la valeur de la température, puis corrige le résultat de la plage en fonction de la température actuelle et émet le résultat corrigé via la broche Echo/RX. La valeur de distance de sortie est un total de deux octets, le premier octet correspond aux 8 bits supérieurs de la distance (HDate) et le second octet correspond aux 8 bits inférieurs de la distance (LData), en millimètres. Autrement dit, la valeur de distance est (HData*256 + LData) mm.
Principe de fonctionnement de la mesure de la température de déclenchement du port série :
Avant la mise sous tension du module, branchez d'abord le capuchon du cavalier sur le cavalier de sélection de mode pour mettre le module en mode de déclenchement du port série.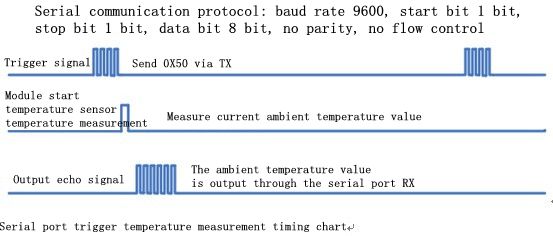
Dans ce mode, il suffit d'entrer 0X50 (débit en bauds 9600) sur la broche Trig/TX, le système démarrera le capteur de température pour mesurer la température actuelle, puis sortira la valeur de température via la broche Echo/RX. Après avoir mesuré la température d'achèvement, le module renverra une valeur de température d'octet (TData), la valeur de température réelle est TData-45. Par exemple, après avoir envoyé 0X50 via TX et reçu 0X45 sur RX, la valeur de température à ce moment est [69 (valeur décimale 0X45) -45] = 24 degrés.
Précautions:
1. Ce module ne doit pas être connecté à l'alimentation. Si vous souhaitez avoir une connexion en direct, connectez d'abord la borne GND du module, sinon cela affectera le fonctionnement normal du module.
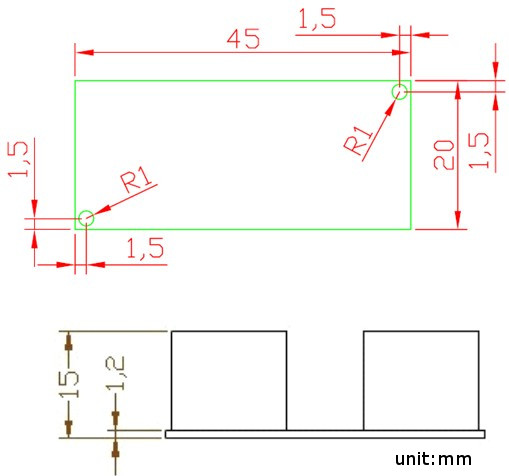
2. Lors de la mesure de la distance, la surface de l'objet mesuré n'est pas inférieure à 0,5 mètre carré et le plan doit être aussi plat que possible, sinon le résultat de la mesure sera affecté.
3. Si la surface de test n'est pas très régulière ou lors du test d'un objet éloigné, plusieurs mesures peuvent être utilisées pour la corriger.
5 modules de télémétrie à ultrasons US-100