
Buscar productos...

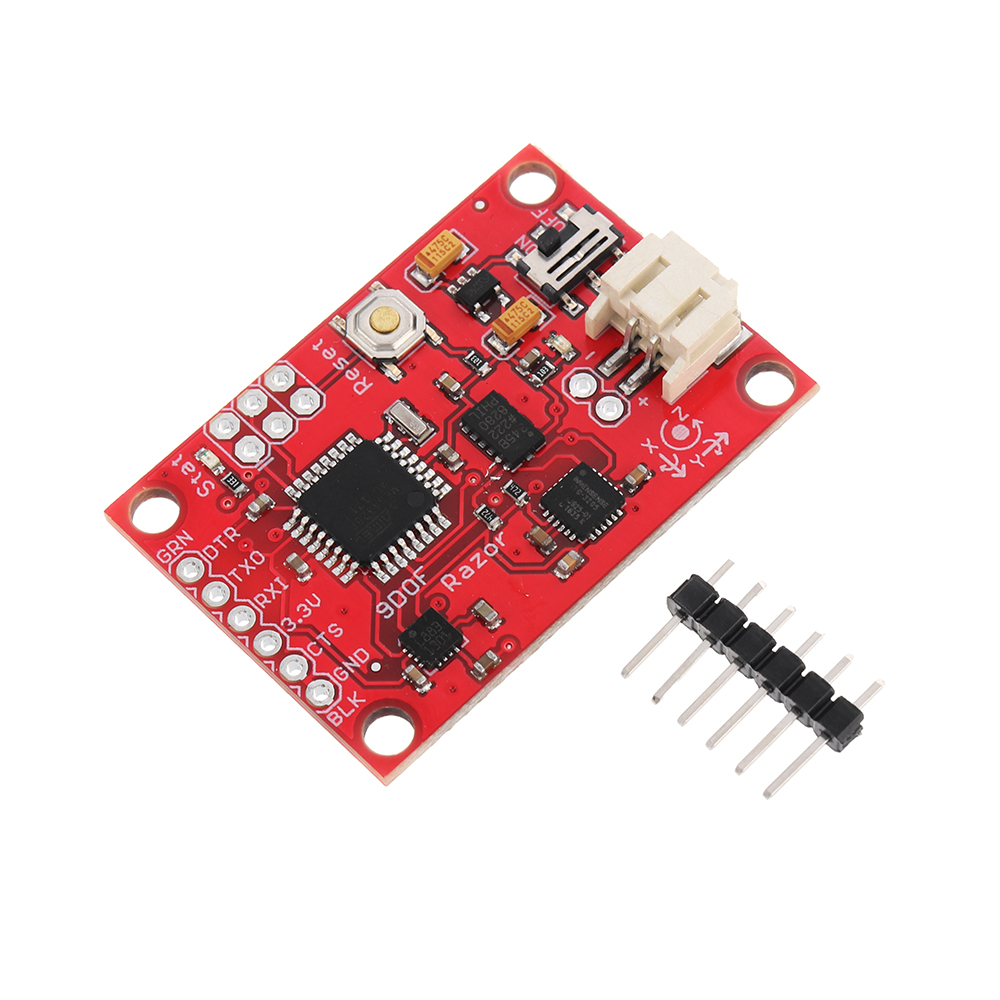
Podría ser bueno encender elMaquinilla de afeitarunos minutos antes de la calibración, para que los sensores puedan calentarse. Calibrar los sensores la primera vez puede ser un poco complicado, pero vamos:
Si no cambió los valores predeterminados del firmware, debería ver muchos resultados como este:
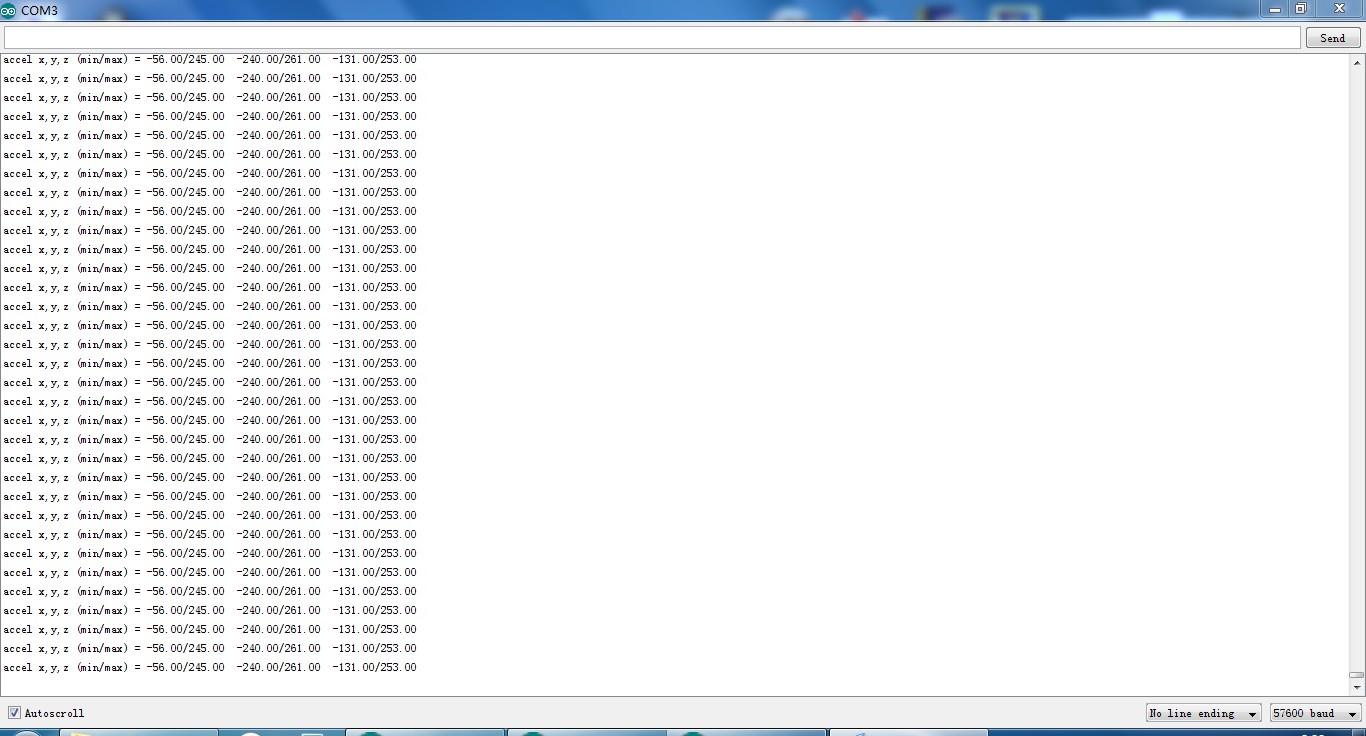
#YPR=-155.73,-76.48,-129.51configurar el firmwaremodo de salidaacalibraciónenviando la cadena #oc. Ahora debería ver una salida como esta:
aceleración x,y,z (mín./máx.) = -5,00/-1,00 25,00/29,00 225,00/232,00Calibración del magnetómetro:
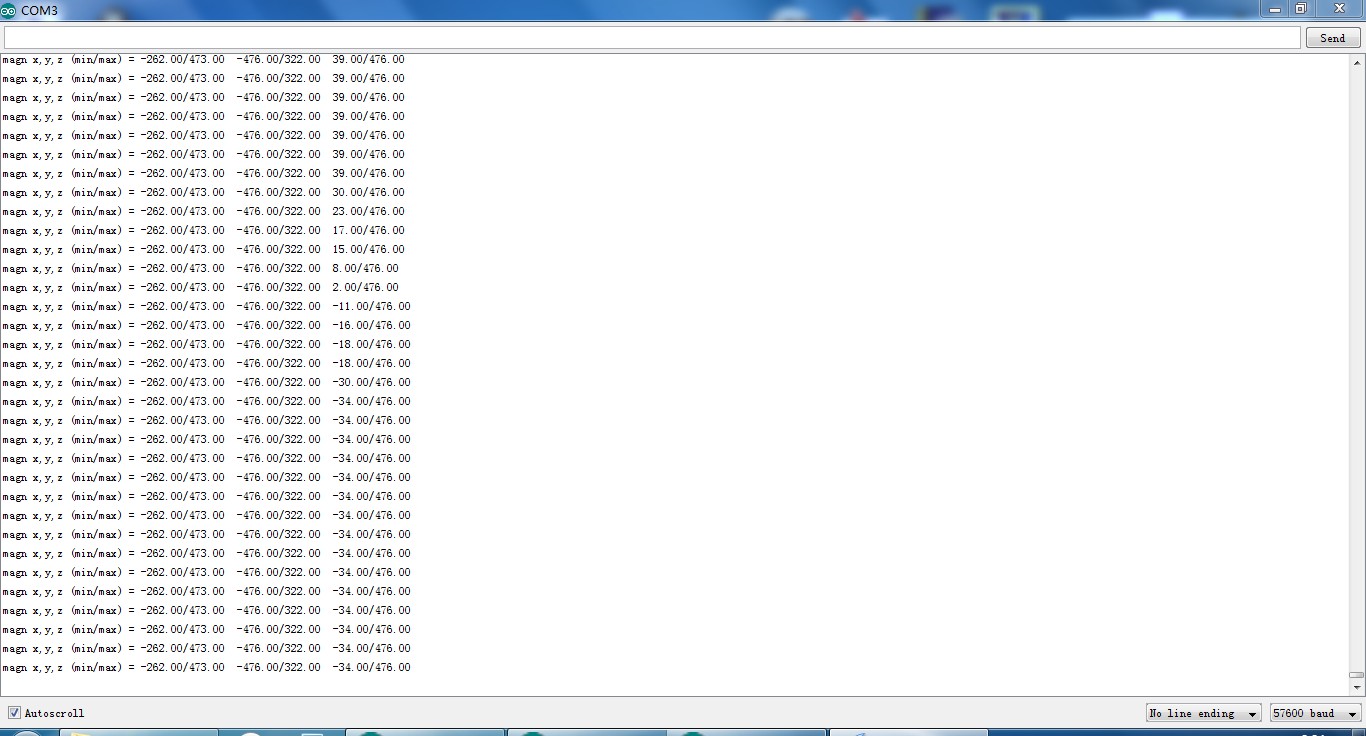
Ahora debería tener algo como esto en sumonitor de serie:
magn x,y,z (mín./máx.) = -564,00/656,00 -585,00/635,00 -550,00/564,00Ponga estos valores en Razor_AHRS.ino.
Calibración del giroscopio:
Ahora debería tener una salida que se vea así:
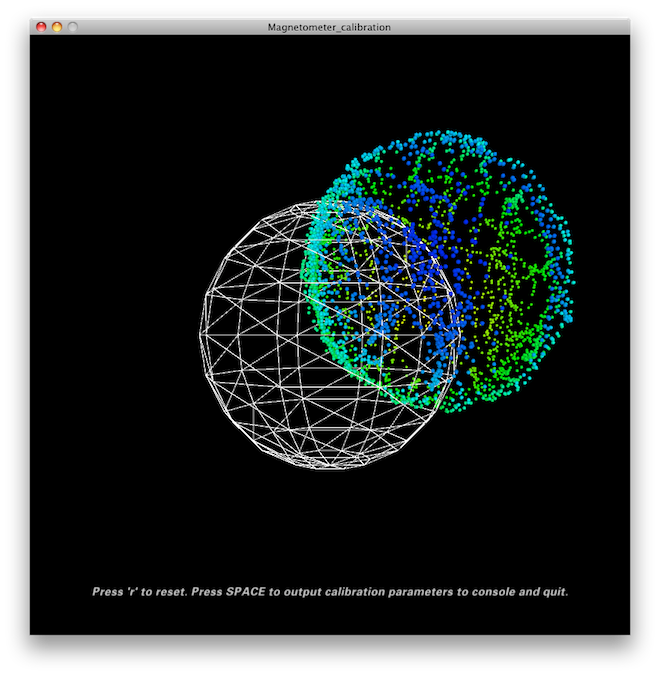
giroscopio x,y,z (actual/promedio) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Intente girar el sensor de manera que cubra todas las orientaciones para producir puntos que cubran la esfera de manera más o menos uniforme.
En un entorno mayormente sin distorsiones, esto podría verse así:
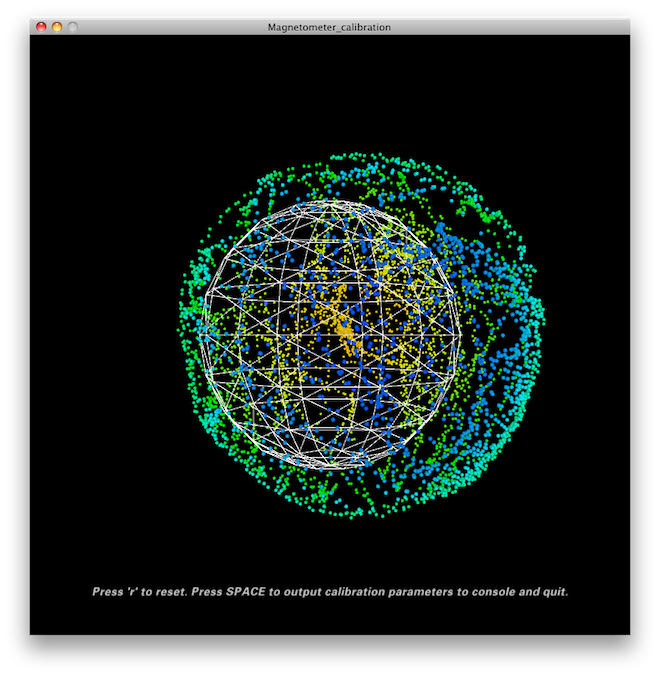
Presiona ESPACIO y mira elProcesandoconsola: encontrará algunas líneas de código que debe colocar en el firmware en "ÁREA DE CONFIGURACIÓN DEL USUARIO" / "CALIBRACIÓN DEL SENSOR" y listo.
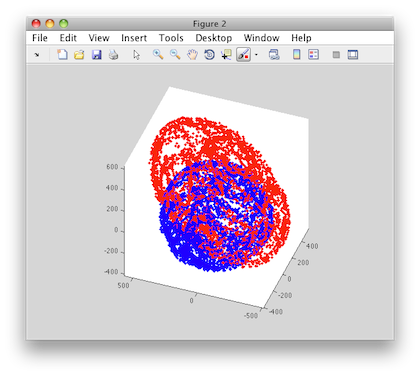
Los datos recopilados (los puntos) también se escriben en un archivo magnetom.float en la carpeta de bocetos. Ahora, en caso de que tenga Matlab, en Matlab/magnetometer_calibration encontrará un script llamado magnetometer_calibration.m que usa este archivo y produce algunos gráficos para usted, para que pueda verificar visualmente la calibración.
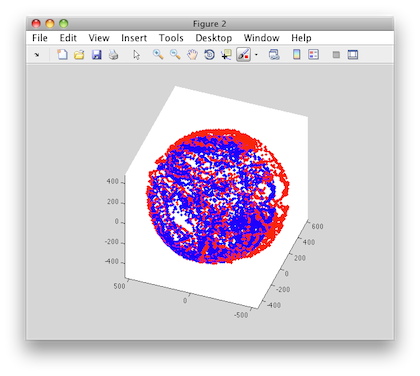
Ajuste elipsoide y valores corregidos:
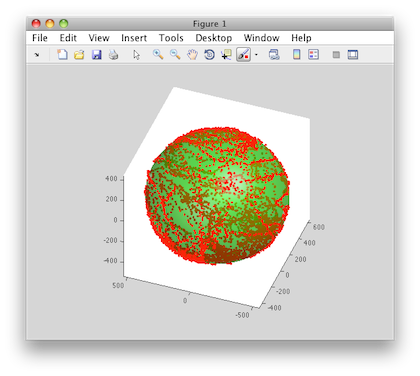
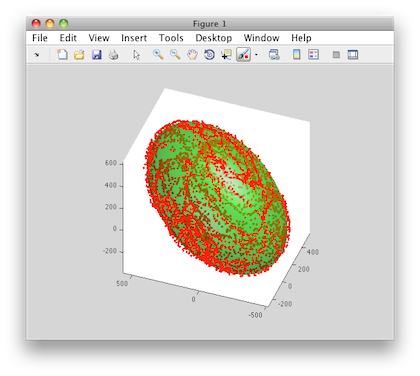
Valores de magnetómetro sin procesar muestreados:
Ajuste elipsoide y valores corregidos:
Envío | Periodo de entrega | Para piezas en stock, los pedidos se estiman que saldrán en 3 días. Elecbee envía pedidos una vez al día, aproximadamente a las 5 pm, excepto los domingos. Una vez enviado, el tiempo de entrega estimado depende del transportista que elijas a continuación. DHL Express: 3-7 días hábiles DHLeCommerce: 12-22 días hábiles FedEx International Priority: 3-7 días hábiles EMS: 10-15 días hábiles Correo aéreo registrado: 15-30 días hábiles | |
| Tarifas de envío | Las tarifas de envío para tu pedido se pueden encontrar en el carrito de compras. | ||
| Opciones de envío | Las tarifas de envío para tu pedido se pueden encontrar en el carrito de compras. | ||
| Seguimiento de envío | Te notificaremos por correo electrónico con el número de seguimiento una vez que el pedido sea enviado. Puedes seguir tu pedido utilizando la función “Seguir mi pedido”. | ||
| Devolución/Garantía | Devolución | Normalmente se aceptan devoluciones cuando se completan dentro de los 30 días desde la fecha de envío, por favor contacta con el servicio al cliente para obtener una autorización de devolución. Las piezas deben estar sin usar y en su embalaje original. El cliente debe hacerse cargo del envío | |
| Garantía | Todas las compras de Elecbee incluyen una política de devolución de 30 días y una garantía de 1 año contra defectos de fabricación. | ||
| Esta garantía no se aplicará a ningún artículo donde los defectos hayan sido causados por ensamblaje incorrecto por parte del cliente, incumplimiento de las instrucciones, modificación del producto, operación negligente o incorrecta por parte del cliente | |||
| Pedidos | Cómo comprar | Elecbee acepta pedidos en línea. | |
| Añadir al carrito > Pagar > Enviar pedido > Completar pago > Entrega | |||
| Pago | PayPal, tarjeta de crédito incluye Visa, Master, American Express, transferencia bancaria. | ||
