
Produkte suchen...

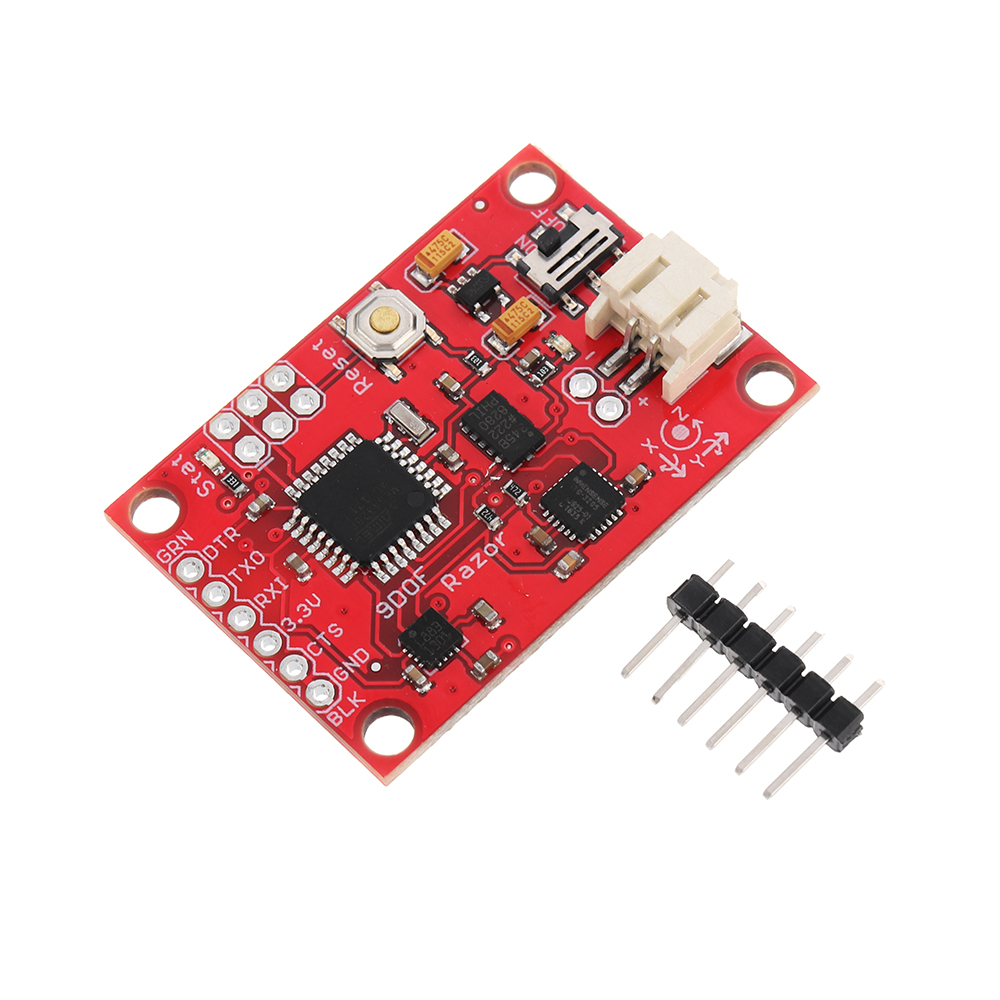
Es könnte gut sein, die einzuschaltenRasierereinige Minuten vor der Kalibrierung, damit sich die Sensoren aufwärmen können. Das erstmalige Kalibrieren der Sensoren kann etwas knifflig sein, aber los geht's:
Wenn Sie die Firmware-Standardeinstellungen nicht geändert haben, sollten Sie viele Ausgaben wie diese sehen:
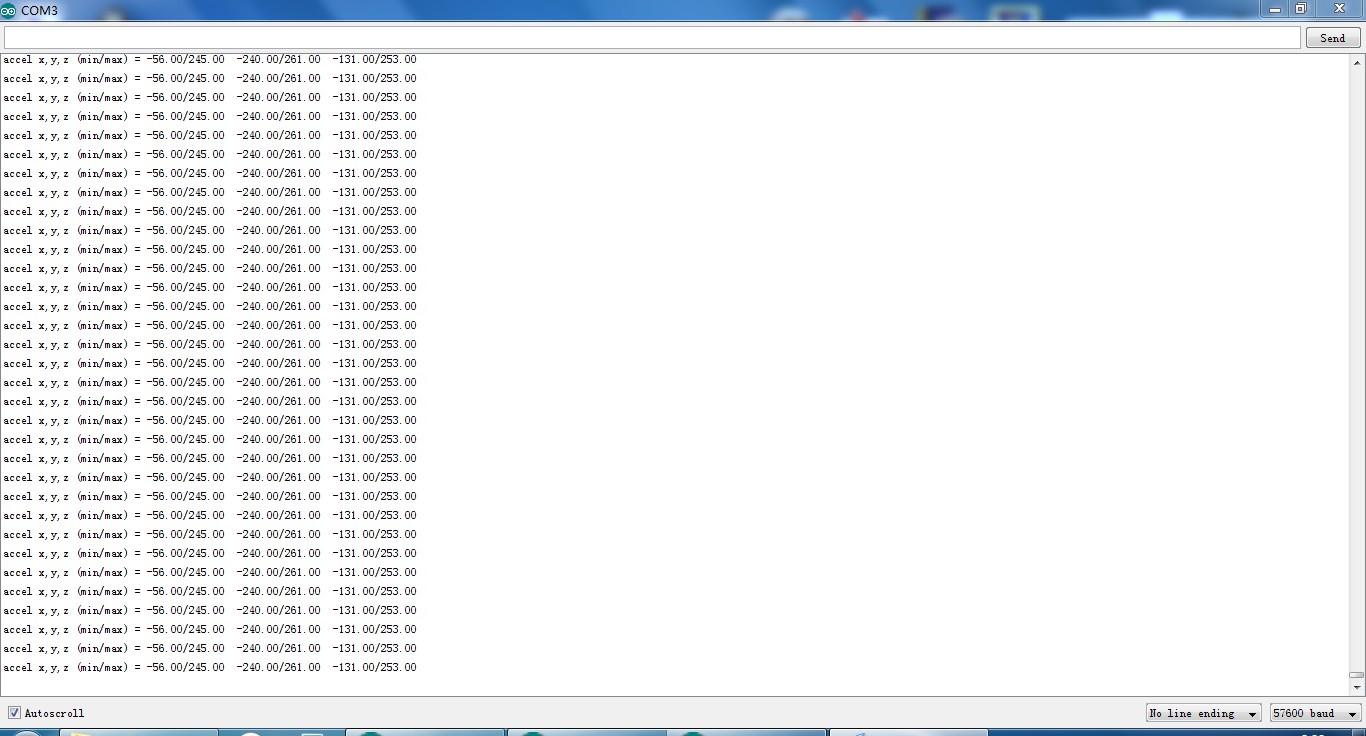
#YPR=-155,73,-76,48,-129,51Stellen Sie die Firmware einAusgabemodusZuKalibrierungindem Sie die Zeichenfolge #oc senden. Sie sollten jetzt eine Ausgabe wie diese sehen:
Beschleunigung x,y,z (min/max) = -5,00/-1,00 25,00/29,00 225,00/232,00Kalibrieren des Magnetometers:
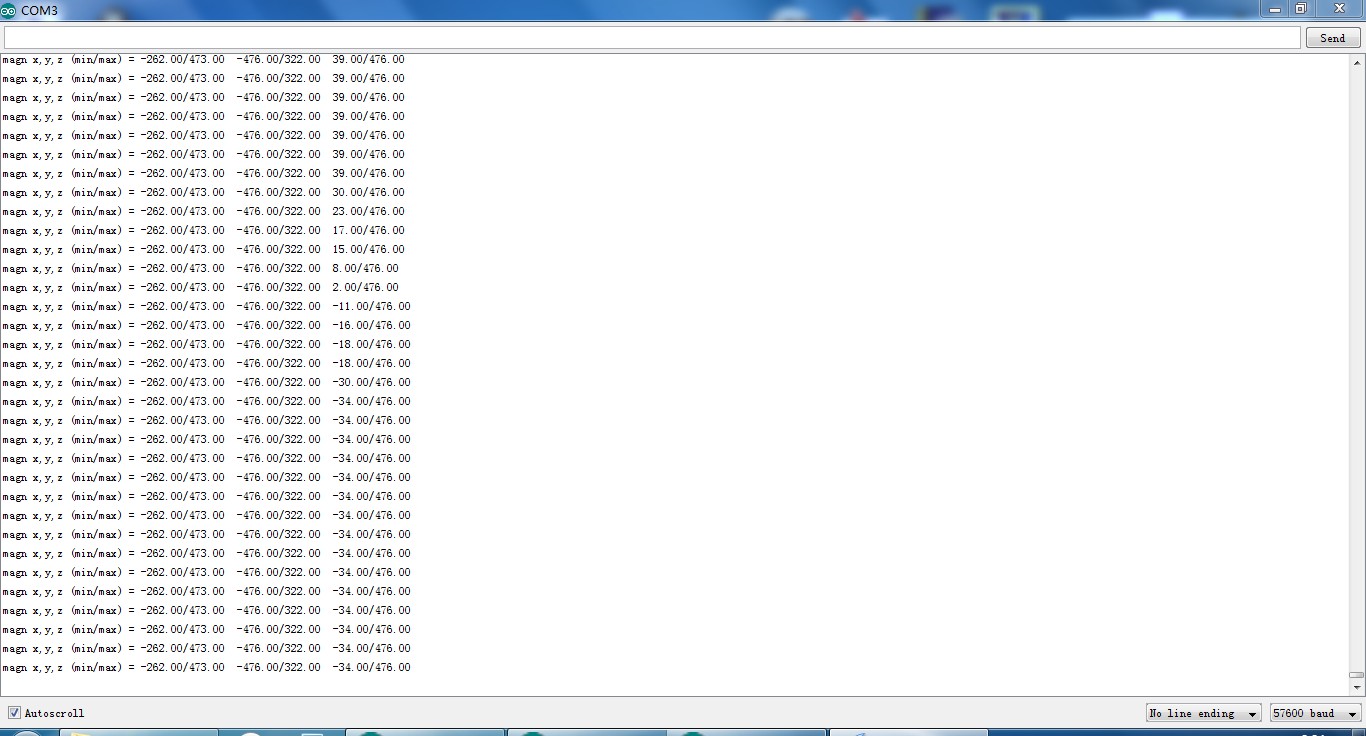
Sie sollten jetzt so etwas in Ihrem habenSerieller Monitor:
Größe x,y,z (min/max) = -564,00/656,00 -585,00/635,00 -550,00/564,00Fügen Sie diese Werte in Razor_AHRS.ino ein.
Kalibrieren des Gyroskops:
Sie sollten jetzt eine Ausgabe haben, die so aussieht:
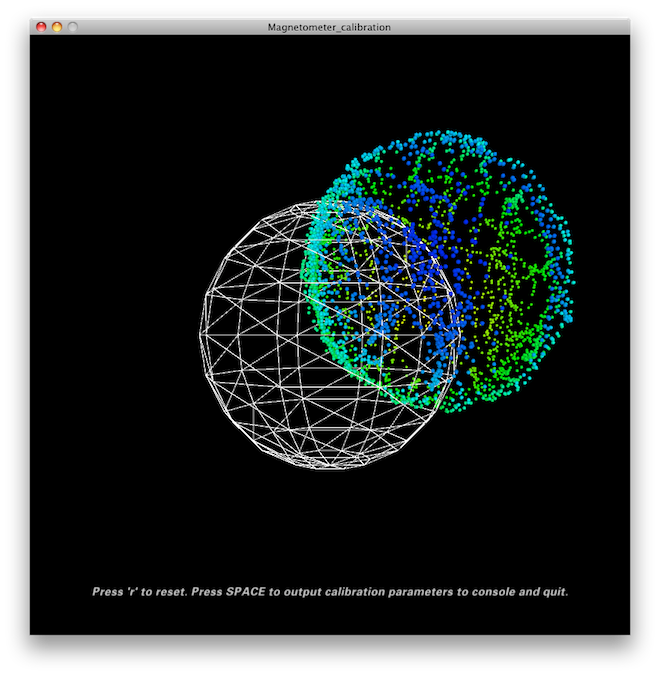
Kreisel x,y,z (aktuell/Durchschnitt) = -29,00/-27,98 102,00/100,51 -5,00/-5,85Versuchen Sie, den Sensor so zu drehen, dass Sie alle Ausrichtungen abdecken, sodass Sie Punkte erzeugen, die die Kugel mehr oder weniger gleichmäßig abdecken.
In einer weitgehend unverzerrten Umgebung könnte das etwa so aussehen:
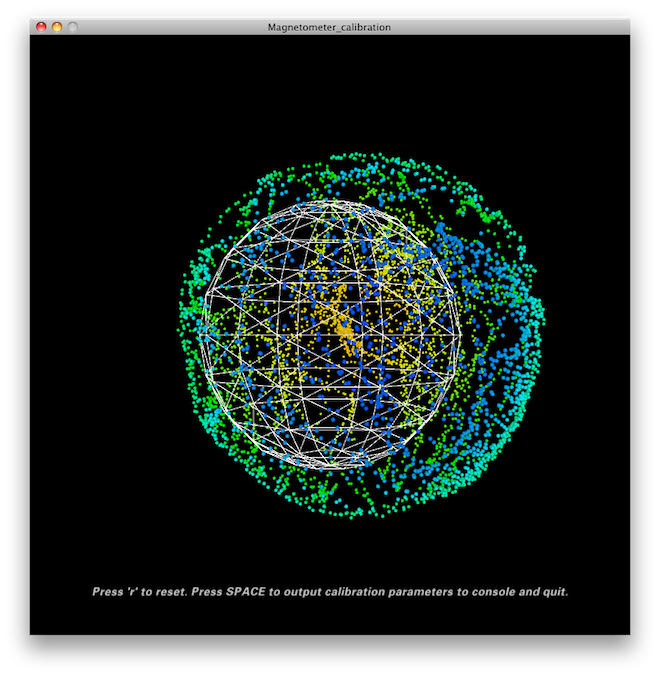
Drücken Sie die LEERTASTE und beobachten Sie diewird bearbeitet-Konsole - Sie finden einige Codezeilen, die Sie in die Firmware unter "USER SETUP AREA" / "SENSOR CALIBRATION" einfügen müssen, und Sie sind fertig.
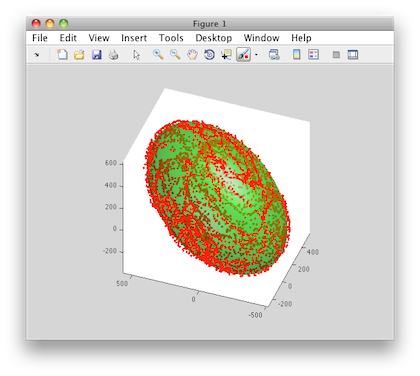
Die gesammelten Daten (die Punkte) werden auch in eine Datei magnetom.float im Skizzenordner geschrieben. Falls Sie nun Matlab besitzen, finden Sie unter Matlab/magnetometer_calibration ein Skript namens magnetometer_calibration.m , das diese Datei verwendet und einige Diagramme für Sie erstellt, sodass Sie die Kalibrierung visuell überprüfen können.
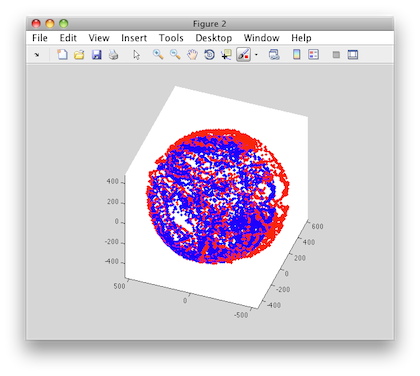
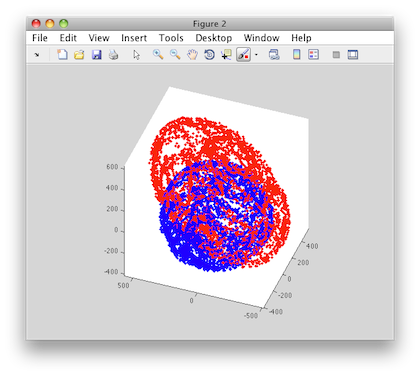
Ellipsoidanpassung und korrigierte Werte:
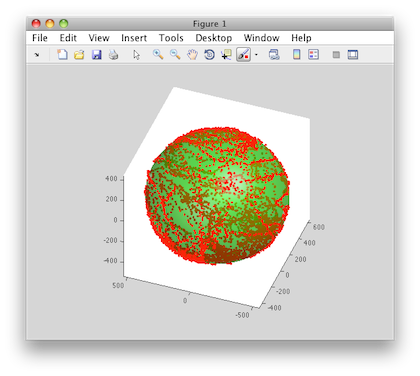
Gesampelte Magnetometer-Rohwerte:
Ellipsoidanpassung und korrigierte Werte:
Versand | Lieferzeit | Für auf Lager befindliche Teile wird die Bestellung voraussichtlich innerhalb von 3 Tagen versendet. Elecbee versendet Bestellungen einmal täglich um ca. 17 Uhr außer sonntags. Nach dem Versand hängt die geschätzte Lieferzeit von der gewählten Versandmethode ab. DHL Express: 3-7 Werktage DHLeCommerce: 12-22 Werktage FedEx International Priority: 3-7 Werktage EMS: 10-15 Werktage Einschreiben: 15-30 Werktage | |
| Versandkosten | Versandkosten für Ihre Bestellung finden Sie im Warenkorb. | ||
| Versandoptionen | Versandkosten für Ihre Bestellung finden Sie im Warenkorb. | ||
| Lieferverfolgung | Wir benachrichtigen Sie per E-Mail mit der Sendungsnummer, sobald die Bestellung versendet wurde. Sie können Ihre Bestellung über die Funktion „Meine Bestellung verfolgen“ nachverfolgen. | ||
| Rückgabe/Garantie | Rückgabe | Rückgaben werden normalerweise innerhalb von 30 Tagen ab Versanddatum akzeptiert. Bitte kontaktieren Sie den Kundenservice für eine Rückgabegenehmigung. Teile sollten unbenutzt und in Originalverpackung sein. Der Kunde trägt die Versandkosten. | |
| Garantie | Alle Elecbee-Käufe kommen mit einer 30-Tage-Geld-zurück-Rückgaberichtlinie sowie einer 1-jährigen Elecbee-Garantie gegen Produktionsmängel. | ||
| Diese Garantie gilt nicht für Artikel, bei denen Mängel durch unsachgemäße Montage durch den Kunden, Nichtbefolgung der Anweisungen, Produktmodifikation, fahrlässige oder unsachgemäße Handhabung entstanden sind. | |||
| Bestellung | Wie kaufen? | Elecbee akzeptiert Online-Bestellungen. | |
| Zum Warenkorb hinzufügen > Kasse > Bestellung absenden > Zahlung vervollständigen > Lieferung | |||
| Zahlung | PayPal, Kreditkarten (Visa, Master, American Express), Banküberweisung. | ||
