
ابحث عن المنتجات...

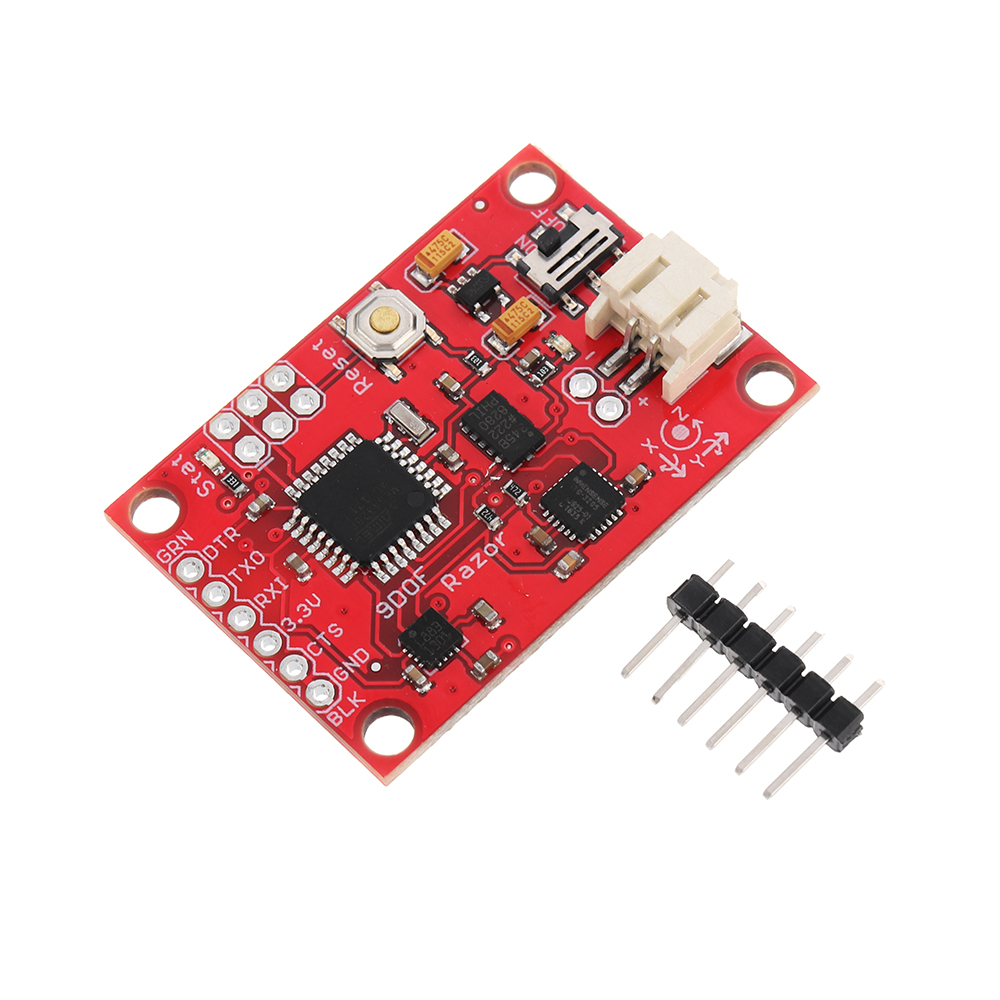
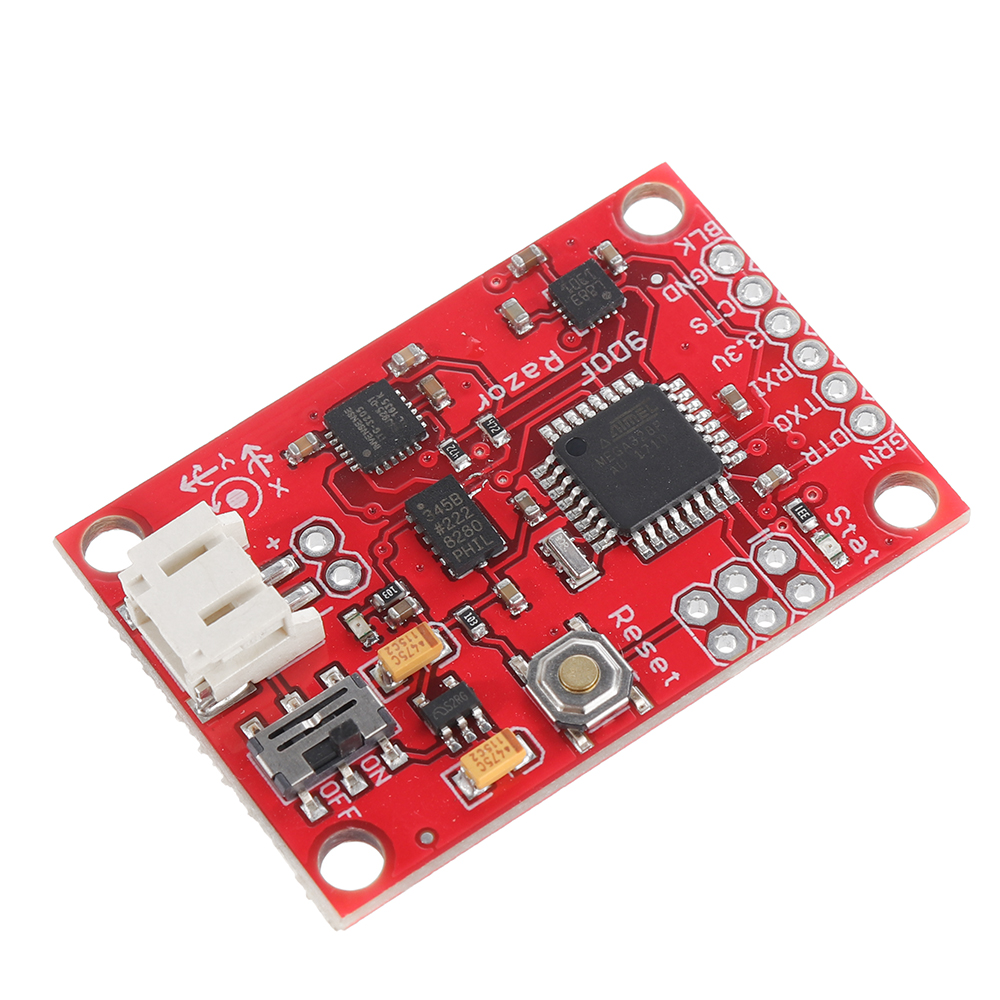
قد يكون من الجيد تشغيلموس الحلاقةقبل المعايرة ببضع دقائق ، بحيث يمكن لأجهزة الاستشعار أن تسخن. قد تكون معايرة المستشعرات في المرة الأولى صعبة بعض الشيء ، ولكن لنبدأ:
إذا لم تكن قد قمت بتغيير الإعدادات الافتراضية للبرامج الثابتة ، فمن المفترض أن ترى الكثير من المخرجات مثل هذا:
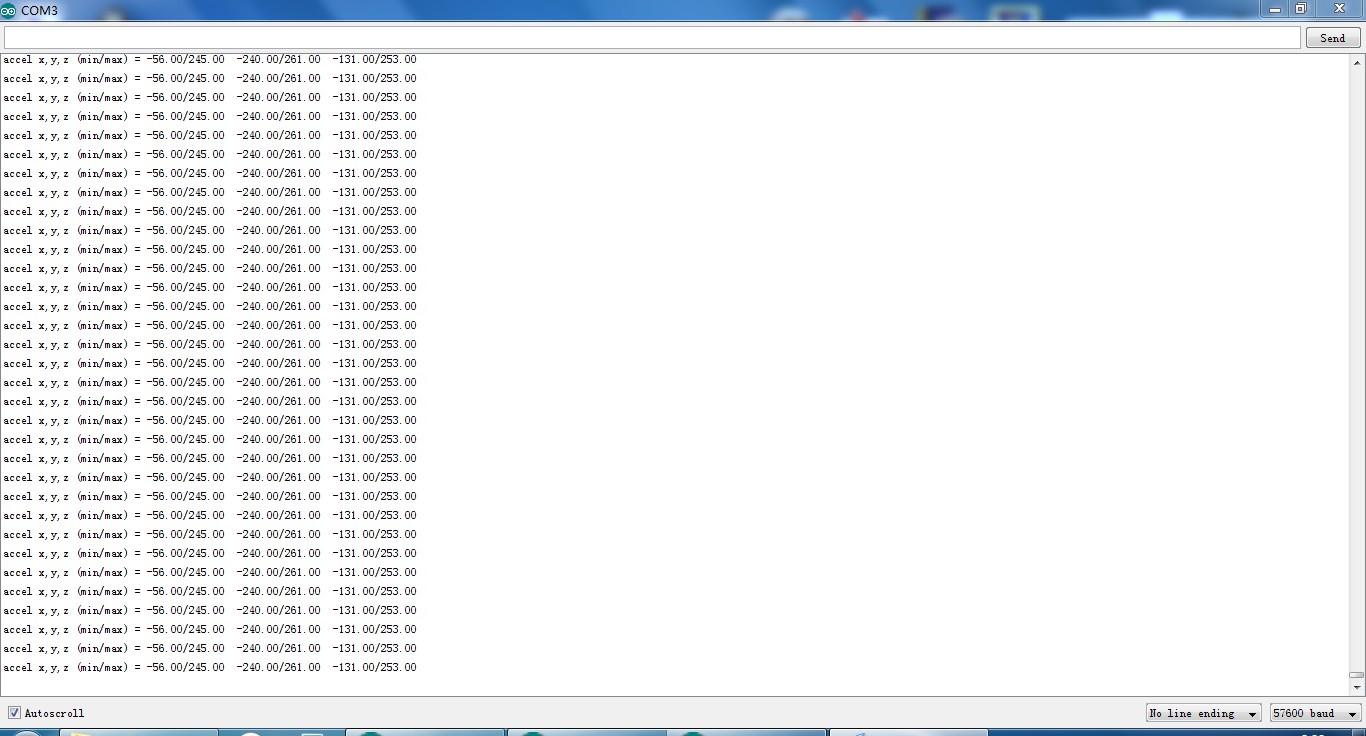
# YPR = -155.73 ، -76.48 ، -129.51اضبط البرنامج الثابتوضع الإخراجلمعايرةعن طريق إرسال السلسلة #oc. يجب أن تشاهد الآن الإخراج مثل هذا:
تسريع x ، y ، z (min / max) = -5.00 / -1.00 25.00 / 29.00 225.00 / 232.00معايرة مقياس المغناطيسية:
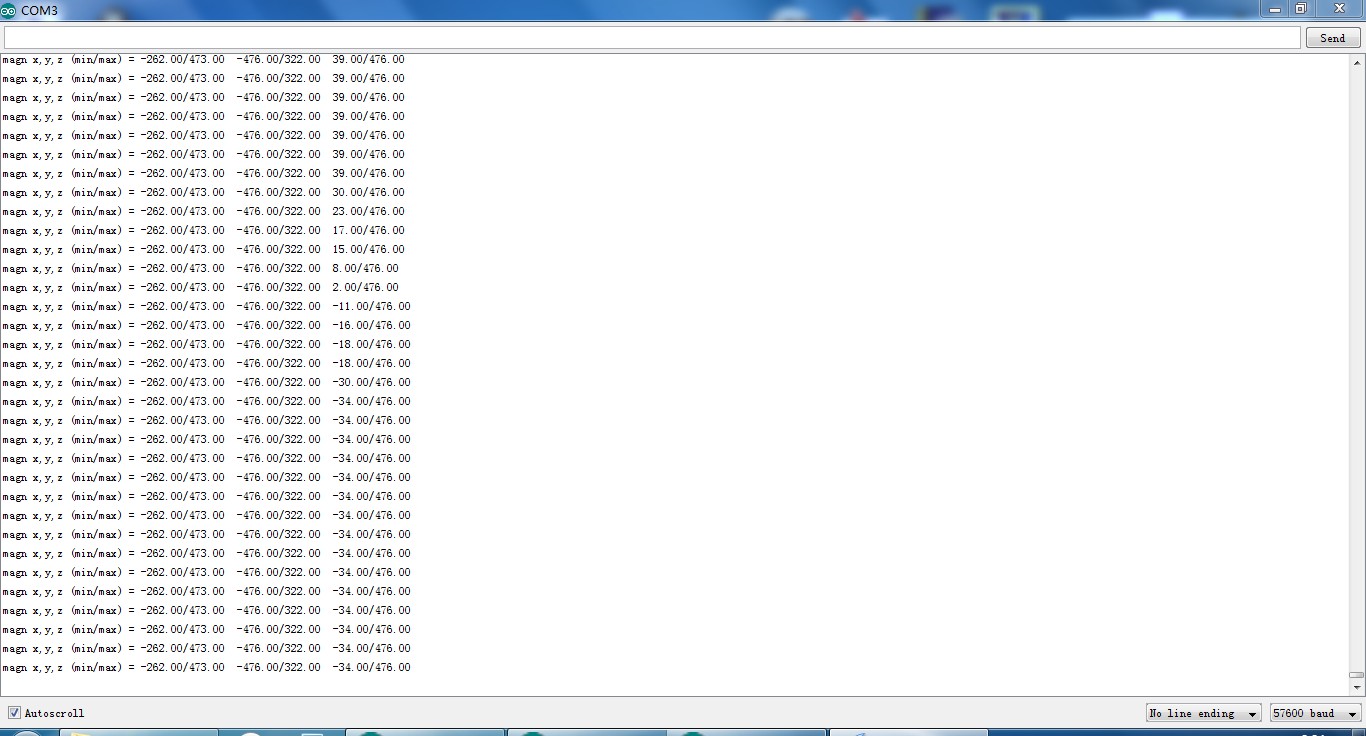
يجب أن يكون لديك الآن شيء مثل هذا في الخاص بكجهاز المراقبة التسلسلي:
magn x، y، z (min / max) = -564.00 / 656.00 -585.00 / 635.00 -550.00 / 564.00ضع هذه القيم في Razor_AHRS.ino.
معايرة الجيروسكوب:
يجب أن يكون لديك الآن إخراج يشبه هذا:
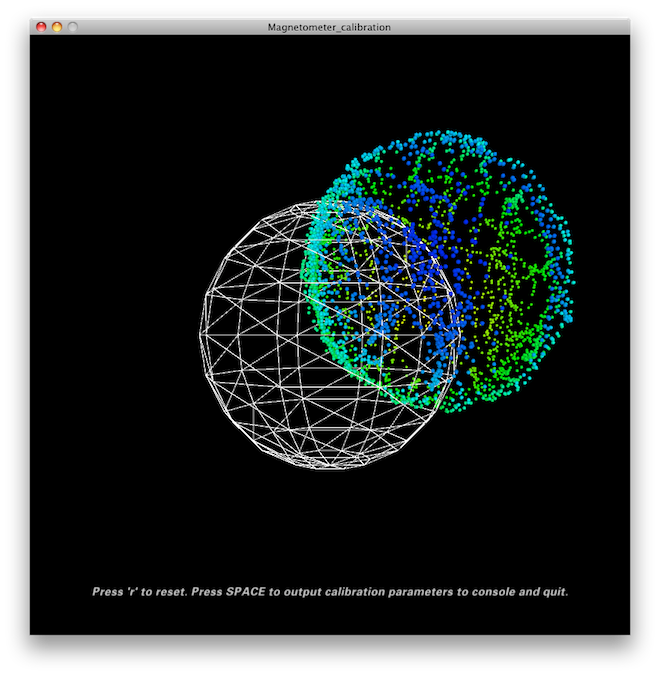
الدوران x ، y ، z (الحالي / المتوسط) = -29.00 / -27.98 102.00 / 100.51 -5.00 / -5.85حاول تدوير المستشعر بطريقة بحيث تغطي جميع الاتجاهات بحيث تنتج نقاطًا تغطي الكرة بشكل متساوٍ أو أكثر.
في بيئة غير مشوهة في الغالب ، قد يبدو هذا شيئًا كالتالي:
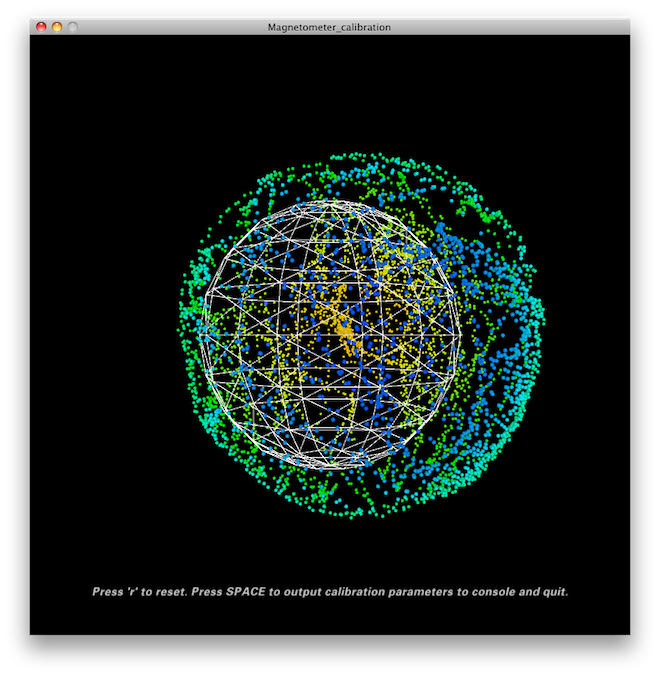
اضغط على SPACE وشاهد ملفيعالجوحدة التحكم - ستجد بعض أسطر التعليمات البرمجية التي يجب عليك وضعها في البرنامج الثابت ضمن "منطقة إعداد المستخدم" / "قياس المستشعر" وبذلك تكون قد انتهيت.
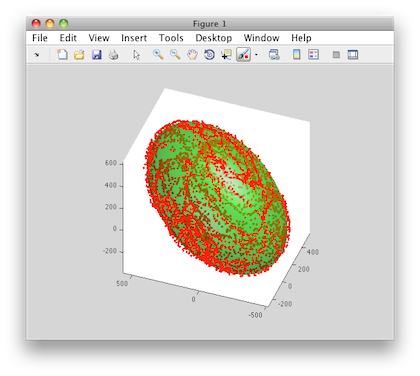
تتم كتابة البيانات المجمعة (النقاط) أيضًا في ملف magnetom.float في مجلد الرسم. الآن في حال كنت تملك Matlab ، ستجد ضمن Matlab / magnetometer_calibration برنامج نصي يسمى magnetometer_calibration.m يستخدم هذا الملف وينتج بعض المخططات لك ، حتى تتمكن من التحقق بصريًا من المعايرة.
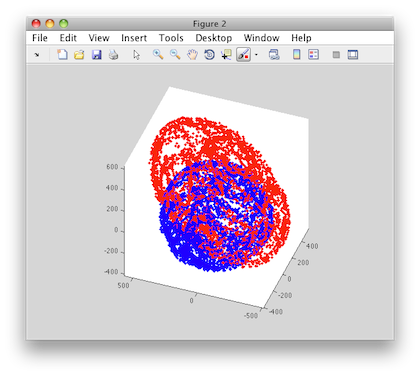
تناسب Ellipsoid والقيم المصححة:
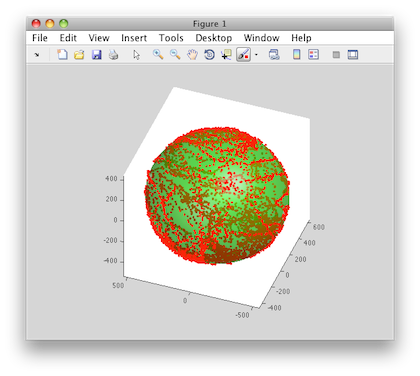
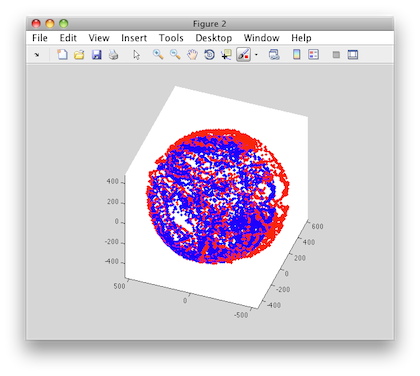
عينات قيم المغناطيسية الخام:
تناسب Ellipsoid والقيم المصححة:
الشحن | فترة التسليم | بالنسبة للأجزاء المتوفرة في المخزون، يُقدّر أن تُشحن الطلبات خلال 3 أيام. تُشحن إلكيبي الطلبات مرة واحدة يومياً حوالي الساعة 5 مساءً باستثناء يوم الأحد. بمجرد الشحن، تعتمد مدة التسليم التقديري على الناقل الذي اخترته أدناه. DHL Express: 3-7 أيام عمل DHLeCommerce: 12-22 يوم عمل FedEx International Priority: 3-7 أيام عمل EMS: 10-15 يوم عمل Registered Air Mail: 15-30 يوم عمل | |
| أسعار الشحن | يمكنك العثور على أسعار الشحن لطلبك في سلة التسوق. | ||
| خيارات الشحن | يمكنك العثور على أسعار الشحن لطلبك في سلة التسوق. | ||
| تتبع الشحن | سنقوم بإعلامك عبر البريد الإلكتروني برقم التتبع بمجرد شحن الطلب. يمكنك تتبع طلبك باستخدام ميزة "تتبع طلبي". | ||
| الإرجاع/الضمان | الإرجاع | يتم عادةً قبول المرتجعات عند إكمالها خلال 30 يوماً من تاريخ الشحن، يرجى التواصل مع خدمة العملاء للحصول على تفويض الإرجاع. يجب أن تكون الأجزاء غير مستخدمة وفي عبوتها الأصلية. يجب على العميل تحمل تكاليف الشحن | |
| الضمان | تأتي جميع مشتريات إلكيبي مع سياسة إرجاع واسترداد الأموال لمدة 30 يوماً، بالإضافة إلى ضمان إلكيبي لمدة سنة واحدة ضد أي عيوب تصنيع. | ||
| لا ينطبق هذا الضمان على أي عنصر تسببت العيوب فيه بسبب تجميع غير صحيح من قبل العميل، أو فشل العميل في اتباع التعليمات، أو تعديل المنتج، أو التشغيل الخاطئ أو غير السليم من قبل العميل. | |||
| الطلب | كيفية الشراء | تقبل إلكيبي الطلبات عبر الإنترنت. | |
| أضف إلى السلة > ادفع > أرسل الطلب > أكمل الدفع > التسليم | |||
| الدفع | باي بال، بطاقة ائتمان تشمل فيزا، ماستر كارد، أمريكان إكسبريس، التحويل البنكي. | ||
